





























4-99
H
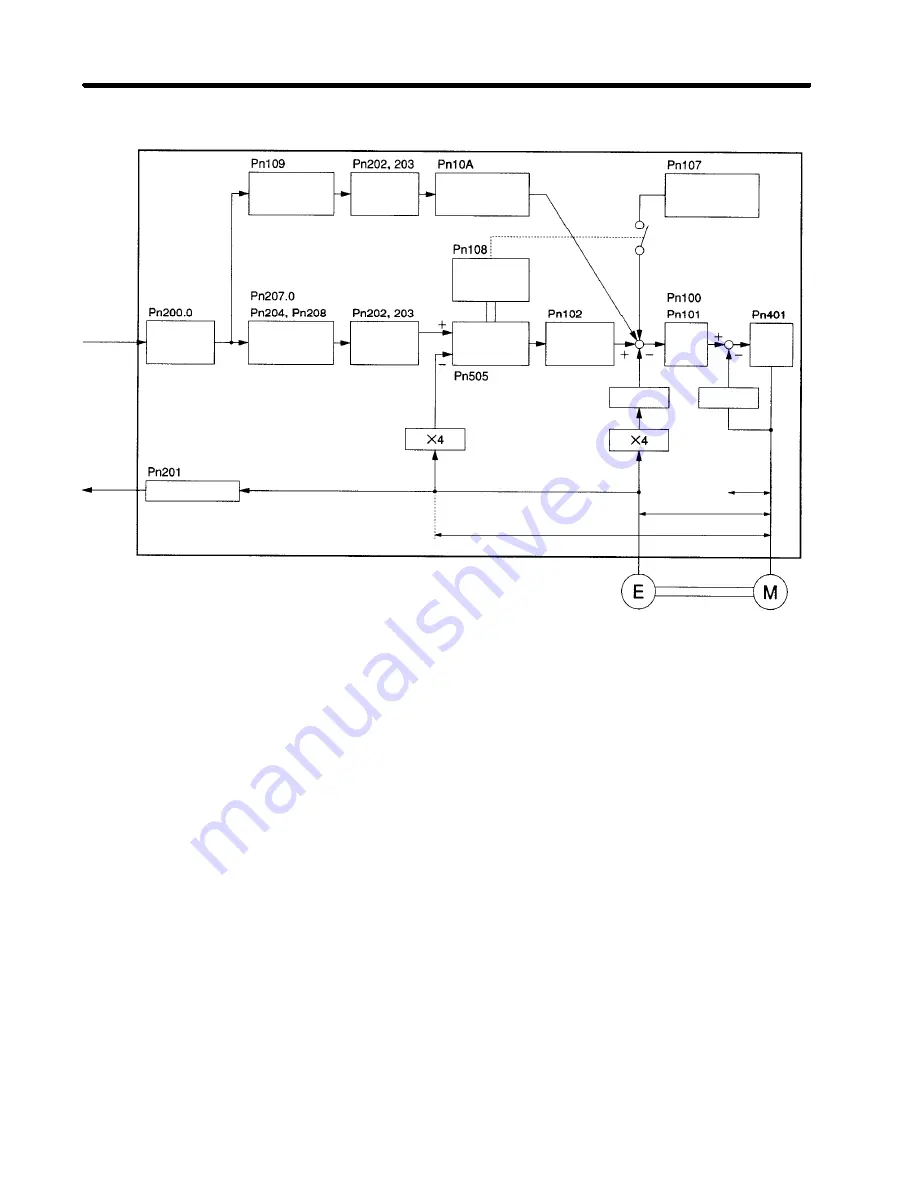
Position Loop Block Diagram (Reference)
Command
pulses
Command
pulse mode
Encoder
output
Encoder dividing
rate
Position com-
mand filter time
constant
Electronic
gear ratio
(G1/G2)
Feed-forward
amount
Feed-forward com-
mand filter
Bias addition
band
Deviation
counter
Position loop
gain
Speed
loop
Current
loop
Current
detection
Speed
detection
Current loop
Speed loop
Position loop
Encoder
Servomotor
Bias rotational
speed
Electronic gear
ratio (G1/G2)
H
Gain Adjustment Procedure
•
The servo system control block is configured from the following three loops: Position loop, speed loop,
and current loop.
•
The current loop is the innermost loop, followed by the speed loop, then the position loop.
•
Outputs from outer loops become inputs to inner loops, and for outer loops to perform suitable control
operations, it is necessary that inner loops respond sufficiently to their inputs, i.e., inner loop respon-
siveness must be high. Also, be sure to adjust the gain starting from the innermost loop.
•
The current loop is adjusted at the factory for sufficient response, so adjust the speed loop first, then
adjust the position loop.
•
Adjust the speed loop to increase compliance with the speed command. Perform the adjustment while
checking the servo rigidity (force needed to maintain position against external force) with the Servo-
lock ON.
•
Adjust the position loop to increase compliance with the position command. Input position commands
using an actual operating pattern, and perform the adjustment while checking the position-fixing time.
Operation
Chapter 4
AUDIN - 7 bis rue de Tinqueux - 51100 Reims - France - Tel : 03.26.04.20.21 - Fax : 03.26.04.28.20 - Web : http: www.audin.fr - Email : [email protected]







































































