





























4-108
H
Parameters Requiring Settings
Parameter
No.
Parameter name
Explanation
Reference
Pn10b.0
Speed control
setting
P control switching
condition
Sets the condition for switching the speed loop from PI
control to P control. Use Pn10C to Pn10F to make the
switching level settings.
4-4-4
Parameter
Details
Pn10C
P control switching
(torque command)
Set when Pn10b.0 = 0 (switch using internal torque
command value). Set the conditions for switching to P
control using the ratio (%) of the Servomotor rated
torque.
Pn10d
P control switching
(speed command)
Set when Pn10b.0 = 1 (switch using speed command
value). Set the speed (r/min.) to switch to P control.
Pn10E
P control switching
(acceleration
command)
Set when Pn10b.0 = 2 (switch using acceleration
command value). Set the acceleration (x 10 r/min. / s)
to switch to P control.
Pn10F
P control switching
(deviation pulse)
Set when Pn10b.0 = 3 (switch using deviation pulse
value). Set the deviation pulse value (command unit) to
switch to P control.
•
If the output torque is saturated during acceleration and deceleration, switch to P control using the
internal torque command value or acceleration command value.
•
If the output torque is not saturated during acceleration and deceleration, and an overshoot or under-
shoot occurs, switch to P control using the speed command value or deviation pulse value.
H
Operation
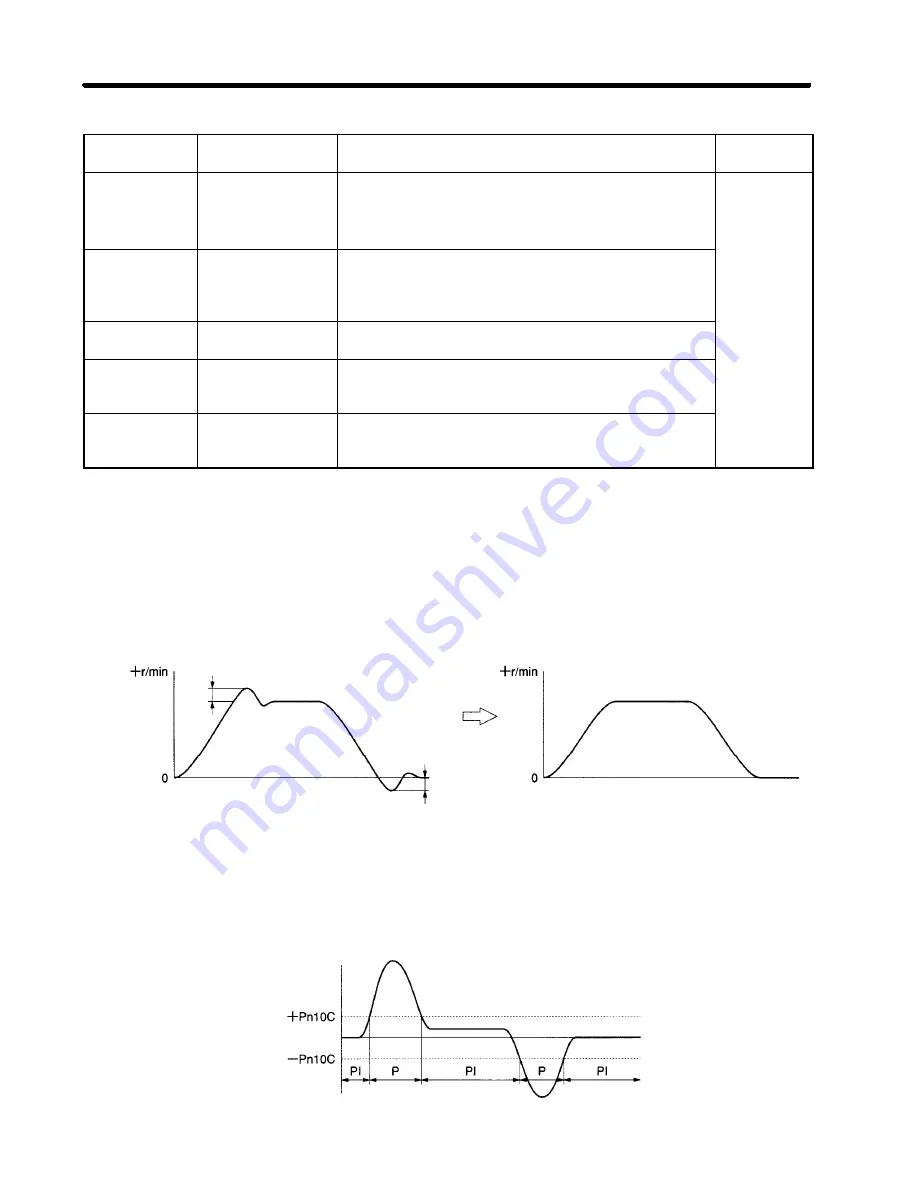
•
Clear the speed overshoot and undershoot by switching to P control.
Overshoot
Servomotor
operation
Undershoot
Operation during PI control
Operation using P-con-
trol switching function
D
Switching Using Torque Command
•
You can switch to P control when the internal torque command value exceeds the setting in Pn10C to
prevent output torque saturation and cancel speed overshoot and undershoot.
Internal torque com-
mand value
Time
Operation
Chapter 4
AUDIN - 7 bis rue de Tinqueux - 51100 Reims - France - Tel : 03.26.04.20.21 - Fax : 03.26.04.28.20 - Web : http: www.audin.fr - Email : [email protected]







































































