





























NAVIS NavDP 4000. Operation Manual
Minimal Power Heading
(option)
When operator press this softkey, a dialog appears on the screen where you must input the heading setpoint value. The
default value is the actual heading at the moment when you press the
AUTO
softkey.
Operator can select preset of heading setpoint or offset from present setpoint.
This mode can also be activated by pressing the
HOLD HGD
button on the Main or Portable Control Panel. In that
case the heading setpoint is automatically set to the actual heading.
Following parameters of Heading Control Law are available from Operator Station:
Rate of Turn
Upper limit to the rate of turn while heading control
Heading Gain
Gain of the heading controller
Off-Heading Limit
Maximum allowable difference between the actual heading and desired heading. If the limit is
exceeded, an alarm is produced.
See Section 5.6, page 79 for details about enter heading setpoint.
9.2.4
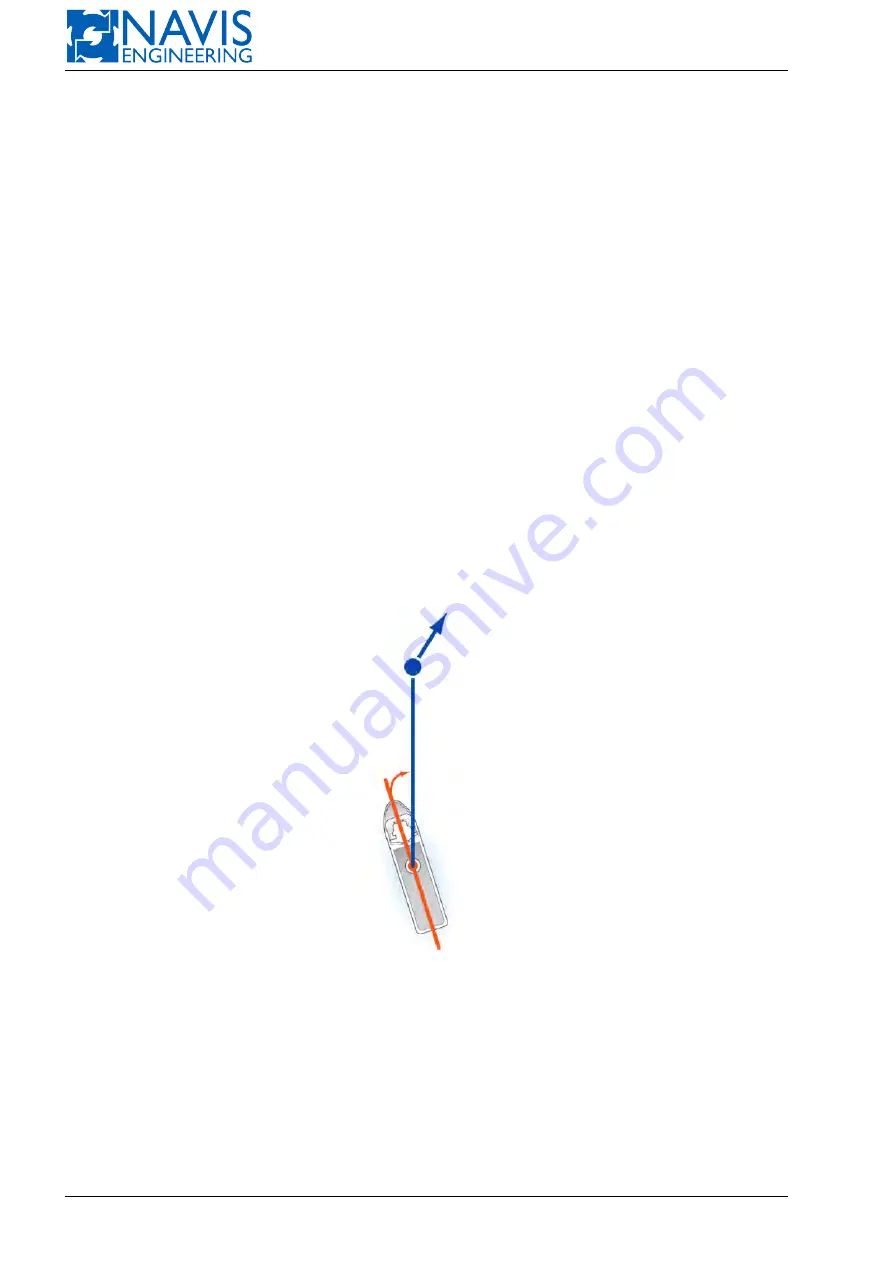
Relative Bearing to Target
This mode can be activated only if the Target Follow mode is activated (the
Target
softkey in the POS panel is green).
Operator may set any Relative Bearing to the target which will be maintained by DP control system.
The Relative Bearing to the target input dialog will be activated by pressing the
Target
softkey in the HDG panel.
The vessel motion in Target mode is shown in Figure 9.4.
Figure 9.4: Relative Bearing to Target
The rotational moment demand is calculated by the controller.
9.2.5
High Speed Tracking
Track control at medium and high speeds by heading control. The rotational moment demand is calculated by the
controller.
The vessel motion in High Speed Tracking mode is shown in Figure 9.5. During the operation, the vessel’s heading is
continuously directed along the current track leg.
Following options can be used in this mode:
163
Doc. 000.JDP-10000-OME, rev.3.3.13/“2102.$–17A-Advanced”







































































