





























NETAVIS Observer 4.6 User Manual (October 2015)
Page 156 of 204
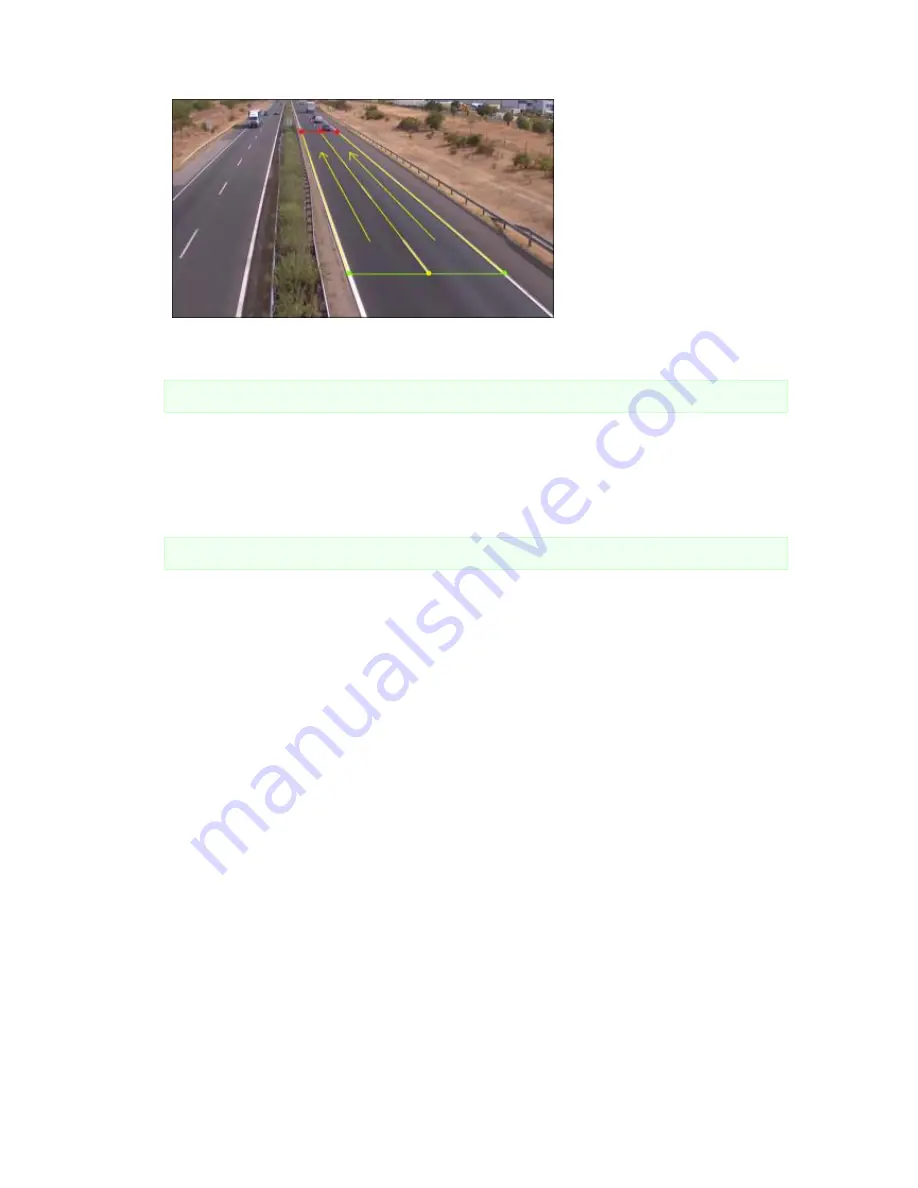
6.
Adjust the
Road length
and
Road width
(both in meters) of the road section which is covered
by the region configured above.
Please note
: The included section should be around 70-100 meter long.
7.
Define the
Measurement time unit
(in minutes) which defines how long a certain traffic state
has to last before a corresponding event is triggered.
8.
Now for each Traffic state except
Normal traffic
the lower and upper thresholds for the
Speed
(in km/h) and
Traffic Density
(in %) have to be defined. Additionally a
Highlight color
,
Icon
,
Sound
, and
Dynamic View Action
can be defined for each Traffic state.
Please note
: The
Speed
and
Density
ranges from the different traffic states should not overlap.
15.3.12 Defining Stopped Vehicle Detection
NETAVIS Observer 4.5 introduced iCAT Traffic and with it Stopped Vehicle Detection. It detects vehicles
which stop on a road or special segments such as an emergency lane or an exit lane.
Here are the steps for configuring Stopped Vehicle Detection:
1.
Choose
Video analysis (iCAT)
from the
System administration
menu. This opens the
Video
analysis (iCAT)
dialog.
2.
Select a camera in the camera tree and in the menu select
Add new definition
.
3.
In the
Type
pop-up menu choose
Stopped Vehicle Detection
which exposes the configuration
settings.
4.
In the
Identifier
text field enter a name for this Stopped Vehicle Detection.
5.
Draw the region you want to monitor in the preview pane. Just click with the mouse to define the
corners of the polygon and close it by crossing an existing edge or by double clicking with the
mouse: