





























HV100 Series High Performance Current Vector Inverter
71
02.17
Pre-excitation holding time of asynchronous motor
0.00
~
10.00S
0.4
~
4.0KW
0.02S
5.5
~
30KW
0.05S
37
~
132KW
0.10S
160
~
630KW
0.20S
Note: This parameter is invalid for VF control
Model setting
003 group- Reserved
004 group-Speed loop and torque control parameters
04.00
Speed loop (ASR1) proportional gain
0.000
~
6.000
1.000
04.01
Speed loop(ASR1) Integral time
0.000
~
32.000S
1.000
04.02
ASR1 filter time constant
0.000
~
0.100S
0.000
04.03
Switch low point frequency
0.00Hz
~【
04.07
】
5.00
04.04
Speed loop (ASR2) proportional gain
0
~
6.000
1.500
04.05
Speed loop(ASR2) Integral time
0.00
~
32.000S
0.500
04.06
ASR2 filter time constant
0.000
~
0.100S
0.000
04.07
Switch high point frequency
04.03 ~ [00.13] upper limit frequency
10.00
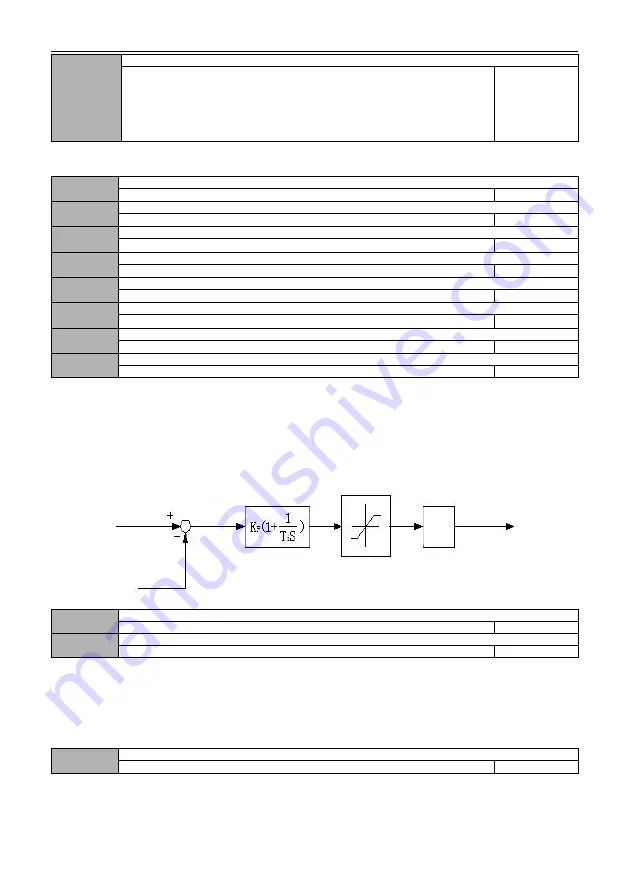
Function codes 04.00 ~ 04.07 are valid without PG vector control.
In vector control mode, the speed response characteristics of vector control are changed by setting the proportional
gain p and integration time i of the speed regulator.
The composition of the speed regulator (ASR) is shown in Figure F4-1. In the figure, KP is the proportional gain P, TI
is the integral time I ..
Fig. F4 -1 simplified diagram of speed regulator
04.08
Positive slip compensation coefficient of vector control (electric state)
50.0% ~ 200.0% * rated slip frequency
100.0%
04.09
Negative slip compensation coefficient of vector control (braking state)
50.0% ~ 200.0% * rated slip frequency
100.0%
Under the vector control mode, the above function code parameters are used to adjust the speed stability accuracy of
the motor. When the motor is under heavy load and the speed is low, increase this parameter, otherwise decrease this
parameter.
The positive slip coefficient compensates the speed when the motor slip is positive, whereas the negative slip
coefficient compensates the speed when the motor slip is negative.
04.10
Selection of speed and torque control
0
~
2
0
0: Speed
When there is no PG current vector control, the control object is speed control.
1:Torque
Torque control is the control object without PG current vector control. Please refer to 04.12 ~ 04.24 for related
parameter settings.
Actual
speed
Torque limit
Speed error
Frequency
(speed) command
Torque
current
given +
Output
filter







































































