




























Note
Action
xx2200000765
Turn the adjusting knob to lock the lead-through
device.
Note
Do not use excessive force!
The arrow in the figure indicates the direction of
locking the lead-through device.
3
Connecting the cables
Note
Action
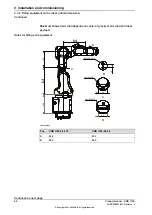
xx2200000766
Connect the cabling between the lead-through
device and robot.
•
R2.C2 connector on process hub of robot
(A)
•
Lead through device connector (B)
1
C
B
A
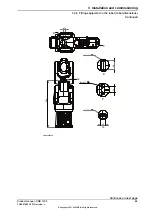
xx2100000292
Connect the cable between robot and controller.
•
R1.C2 connector on robot base (A)
•
Ethernet switch port on controller (B)
•
X19 connector on controller (C)
Note
Ethernet switch port is available for use only when
the
5 Port Ethernet switch
option is selected.
Otherwise, connect the cable to the MGMT port.
Note
Pins 3 and 4 of X19 connector are used for the
lead-through device connection while pins 1 and
2 are occupied by the CP/CS cable for lamp unit.
2
Configuring the lead-through functionality
The lead-through functionality is predefined for robots that are delivered with the
option 3313-1 Lead-through Device ordered.
If the lead-through option is newly ordered for an existing robot and the robot
system is operating in RobotWare 7.6 or later, the Collaborative Speed Control
add-in must be installed to the system to activate the lead-through functionality.
For details about how to install the add-in and configure the lead-through
functionality, see
Product manual - CRB 1100
77
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
3 Installation and commissioning
3.3.7 Installation of lead-through device
Continued
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......




































































