




























Note
Action
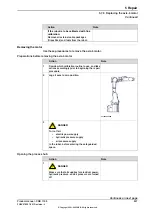
xx1800002996
Remove the screws and washers.
4
Carefully lift out the motor.
5
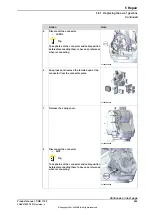
xx1800002997
Remove the timing belt from its groove on the
motor.
6
Refitting the motor
Use these procedures to refit the axis-6 motor.
Refitting the axis-6 motor
Note
Action
Check that:
•
all assembly surfaces are clean and without
damages
•
the motor is clean and undamaged.
1
Continues on next page
540
Product manual - CRB 1100
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
5 Repair
5.7.6 Replacing the axis-6 motor
Continued
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......







































































