





























3 Define the two protection fields for the scanner in
Configuration
>
Fields
.
4 Define the source for input signals of the scanner and configure basic settings
for the inputs and outputs in
Configuration
>
Inputs and outputs
.
5 Select one OSSD pair from the
Signals
panel to pin1 and pin2, and select
another OSSD pair to pin3 and pin4.
The two OSSD pairs will be used for defining the monitoring cases.
6 Create monitoring cases and assign the fields that are to be monitored to
each monitoring cases in
Configuration
>
Monitoring cases
.
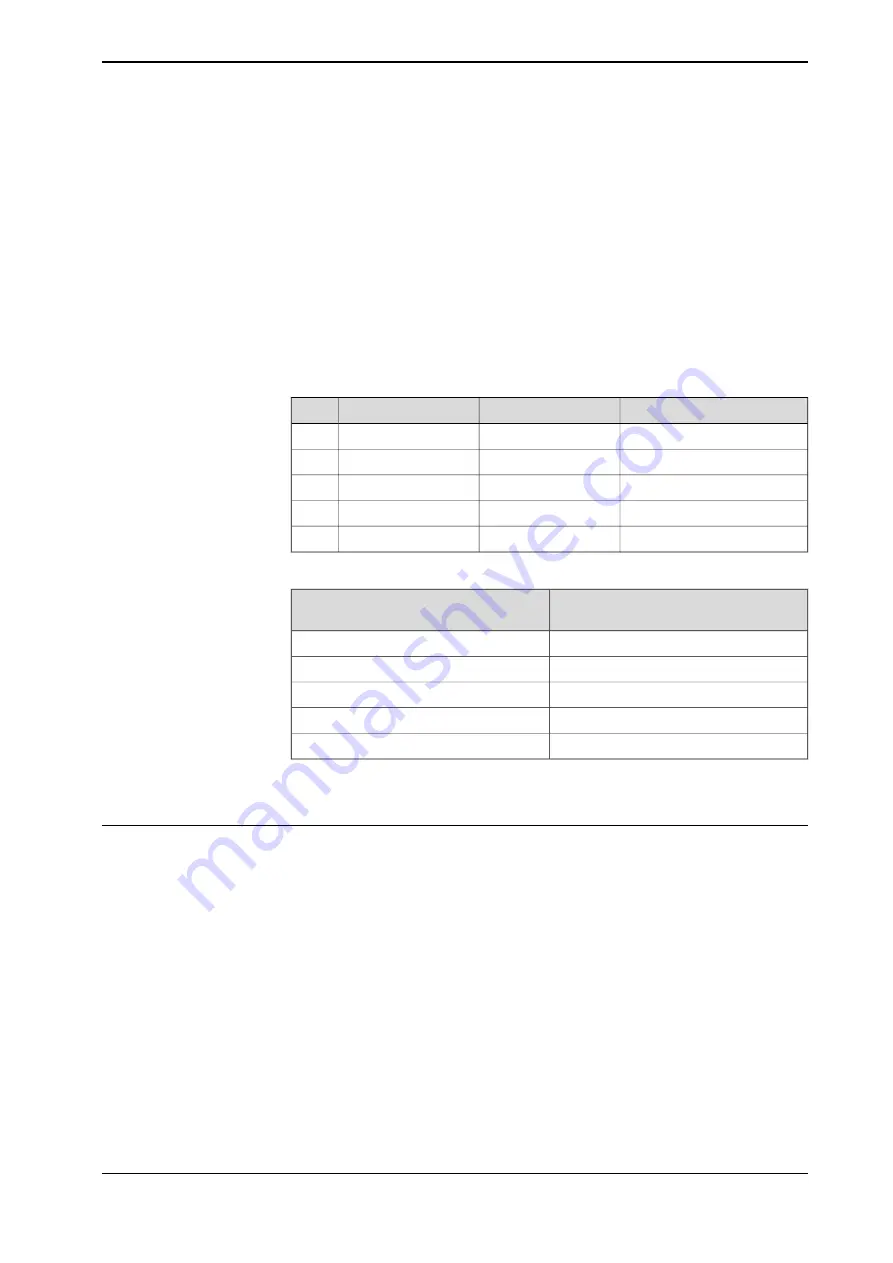
7 Refer to the following table to obtain the pins defined to OSSD pairs. The
pins are from a 17-pin cable that will be used to connect the laser scanner
and scalable I/O device.
Function
Name
Wiring color
Pin
OSSD pair 1, OSSD A
OSSD1A
Brown
1
OSSD pair 1, OSSD B
OSSD1B
Blue
2
OSSD pair 2, OSSD A
OSSD2A
White
3
OSSD pair 2, OSSD B
OSSD2B
Green
4
0 DC
0 V DC
White with grey
17
8 Connect the laser scanner to scalable I/O device with the defined pins.
Pin position number in X2 connector of
the device
i
Pin in cable
D101+
Pin1 (OSSD1A)
DI02+
Pin2 (OSSD1B)
DI03+
Pin3 (OSSD2A)
DI04+
Pin4 (OSSD2B)
Circuit of D101-, D102-, D103- and D104-
Pin17
i
For detailed information of pin definitions in connector X2 Digital inputs of the scalable I/O
device DSQC1042, see the product specification of the controller and
Application
manual - Scalable I/O
.
Configuring the scalable I/O device
Detailed procedures about how to connect and configure the scalable I/O device
DSQC1042 are specified in
Application manual - Scalable I/O
. Following provides
a rough procedure:
1 Make sure that the laser scanner and scalable I/O device is connected as
instructed in previous configuration procedure of laser scanner.
2 Connect the process power supply to connector X1 of the scalable I/O device
via pin locations PWR DO and GND DO.
3 Connect the logic power supply to connector X4 of the scalable I/O device
via pin locations PWR and GND.
4 Connect the Ethernet cable from the robot controller to connector X5.
Continues on next page
Product manual - CRB 1100
143
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.5.6 Configuration of one SafetyIO-base laser scanner (RobotWare 7.6 or later)
Continued
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......