




























3 In the
Controller
tab, choose
Visual SafeMove
from the
Safety
group in the
Configuration
category.
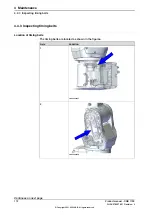
4 In the left pane of the window, choose
Global_TSP
under the
Tool Speed
Supervisions
from the navigation tree.
xx2200000438
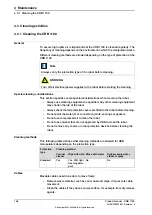
5 In the
Visual SafeMove Properties
window, set the
Max speed (mm/s)
in
the
Speed limits
area to a required value.
xx2200000439
6 Apply the configuration to the controller by clicking
Write to Controller
in
the
Controller
group in the
Configuration
category.
Continues on next page
Product manual - CRB 1100
159
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.7 Use cases of safety configurations
Continued
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......