


















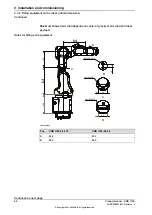










Examples of mounting angles tilted around the X axis (
Gravity Alpha
)
The following illustration shows the IRB 120, but the same principle applies for all
robots.
0°
xx2100000297
-
xx2100000300
xx2100000299
Gravity Alpha
Mounting angle
0
0° (Floor mounted)
1.570796
90° (Wall)
-1.570796
-90° (Wall)
Note
For suspended robots (180°), it is recommended to use
Gravity Beta
instead of
Gravity Alpha
.
Limitations in working area
If mounting the robot on a wall, the working range of axis 1 is limited. These
limitations are specified in the table
.
Defining the system parameters in RobotWare
The value of the system parameters that define the mounting angle must be
redefined when changing the mounting angle of the robot. The parameters belong
to the type
Robot
, in the topic
Motion
.
Continues on next page
Product manual - CRB 1100
63
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
3 Installation and commissioning
3.3.4 Setting the system parameters for an inverted or a tilted robot
Continued
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......





































































