





























The parameters f_dest_address and f_source_address for the SDI are set to
3 and 2, respectively, and for the SDO are set to 5 and 4, respectively.
•
Make sure the address for the SDO signal is the first address of
SDO 8 bytes
slot.
•
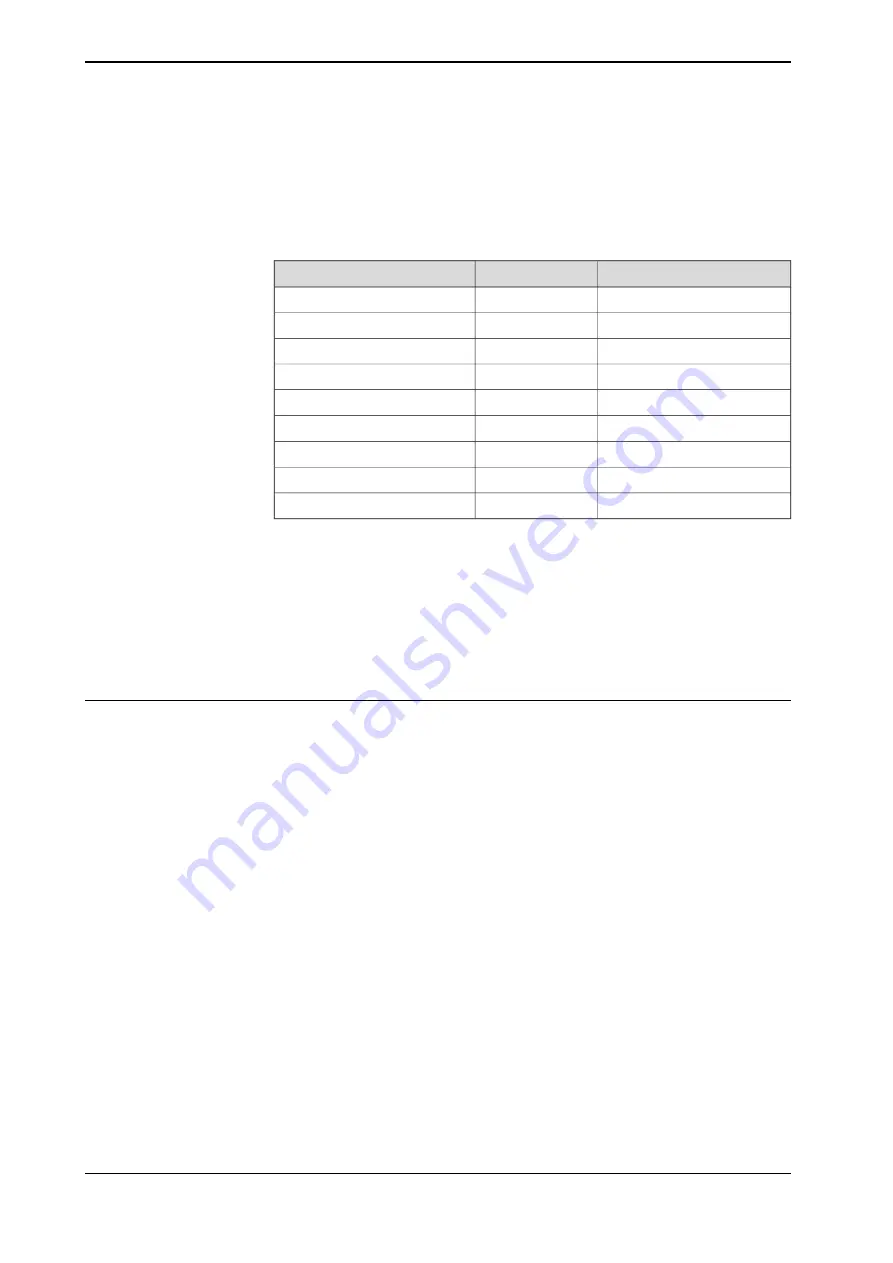
Create variables.
Example address
i
Type
Name
%I3.0
Bool
ProtectingTrigger
%I4.1
Bool
WarningTrigger
%I14.0
Bool
ProtectingTrigger1
%I15.1
Bool
WarningTrigger1
%Q68.0
Bool
ProtectingArea
ii
%Q68.1
Bool
WarningArea
iii
%Q68.2
Bool
SafetyCommunicationEnable
%Q3.0
Bool
ActivateScanner
%Q14.0
Bool
ActivateScanner1
i
%I3.
X
, %I4.
X
, %I14.
X
and %I15.
X
are the addresses of laser scanners; %Q68.
X
is the address
of the OmniCore controller.
%Q3.0 and %Q14.0 are for activating the monitoring cases of the laser scanners.
ii
Value of ProtectingArea depends on logic AND value of ProtectingTrigger and
ProtectingTrigger1.
iii
Value of WarningArea depends on logic AND value of WarningTrigger and WarningTrigger1.
•
Check the communication between the PLC and controller is well and activate
the laser scanner; set up the communication between the laser scanner, PLC
and OmniCore controller.
Configuring SafeMove
To enable SafeMove, perform the following procedure:
1 Log in the FlexPendant.
Make sure the user logged in have access grants to lock safety controller
configurations, safety services and software synchronization.
2 Tap
SafeMove
on the home page.
3 Tap
Load
in the pop-up message box to confirm loading of template SafeMove
configuration files.
The controller restarts.
4 After the controller is restarted, tap
Settings
on the home page.
5 Tap
Safety Controller
.
6 Tap
Synchronization
in the left pane.
7 Jog the robot to match the
Actual Positions
values with the
Sync Positions
values.
Make sure the values are the same.
8 Tap
Synchronize
.
132
Product manual - CRB 1100
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
3 Installation and commissioning
3.7.5.3 Configuration of two PROFIsafe-based laser scanners (RobotWare 7.6 or later and PLC acting
as Master)
Continued
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......