





























3.3 On-site installation
3.3.1 Lifting the robot
3.3.1.1 Lifting the robot by one person
General
This section describes how to lift the robot and move it by one person.
Grasping location
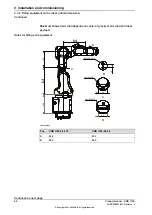
Note
Grasping location
Position
When the robot stands on its foot, grasp
the robot with one hand holding the lower
arm and the other hand holding the swing.
xx2100000155
Stand on foot
When the robot lies by side, grasp the ro-
bot with one hand holding the lower arm
and the other hand supporting at the base.
It is recommended to hold the robot
between your arm and body.
xx2100000156
By side
When the robot is inverted, grasp the robot
with one hand supporting at the housing
and the other hand holding the base.
xx2100000157
Invented
Continues on next page
Product manual - CRB 1100
53
3HAC078007-001 Revision: J
© Copyright 2021-2023 ABB. All rights reserved.
3 Installation and commissioning
3.3.1.1 Lifting the robot by one person
Summary of Contents for CRB 1100
Page 1: ...ROBOTICS Product manual CRB 1100 ...
Page 162: ...This page is intentionally left blank ...
Page 184: ...This page is intentionally left blank ...
Page 652: ...This page is intentionally left blank ...
Page 698: ...This page is intentionally left blank ...
Page 712: ...This page is intentionally left blank ...
Page 714: ...This page is intentionally left blank ...
Page 719: ......







































































