





























8 Manual Control
8.1 Mechanical Zero Return Control
138
FX
3U
-20SSC-H Positioning Block User's Manual
8.1.3
Data-set type mechanical zero return
Use the data-set type mechanical zero return procedure to set the position moved by JOG or manual pulse
generator operation, as a zero-point. Therefore the work piece does not travel at the mechanical zero return
command.
This zero return procedure is frequently used for equipment without a DOG, or for transfer lines without a
mechanical zero-point.
→
For the zero return interlock function, refer to Subsection 7.9.10
→
For details on the table operation, refer to Chapter 10
→
For the parameters, control data and monitor data, refer to Chapter 11
Operation
1) With JOG or manual pulse generator operation, the work piece is moved to the desired zero-point.
→
For jog operation, refer to Section 8.2
→
For manual pulse generator operation, refer to Section 8.3
2) Turn ON the mechanical zero return command.
3) The current address is set as the mechanical zero-point address in the positioning parameters.
4) The 20SSC-H turns the zero return complete flag to ON.
In the data-set type mechanical zero return mode, the positioning completion flag does not turn ON.
→
For the parameters, control data and monitor data, refer to Chapter 11
Note
• The zero return command is not accepted if the zero-point pass signal servo status is OFF.
Before executing zero return, be sure to rotate the servomotor at least once to turn the zero-point pass
signal ON. The zero-point pass signal turns ON when the motor passes the motor reference position signal
(Z-phase).
To execute zero return immediately after power-on, specify "1: Motor Z-phase pass unnecessary after
power-on" (default setting) at servo parameter function selection C-4. With this setting, the zero-point pass
signal turns ON even if the motor does not pass the zero-point (Z-phase).
• With the simultaneous start flag ON, the X-axis mechanical zero return command simultaneously starts the
X and Y-axes mechanical zero return operation.
(The 20SSC-H ignores the Y-axis mechanical zero return command.)
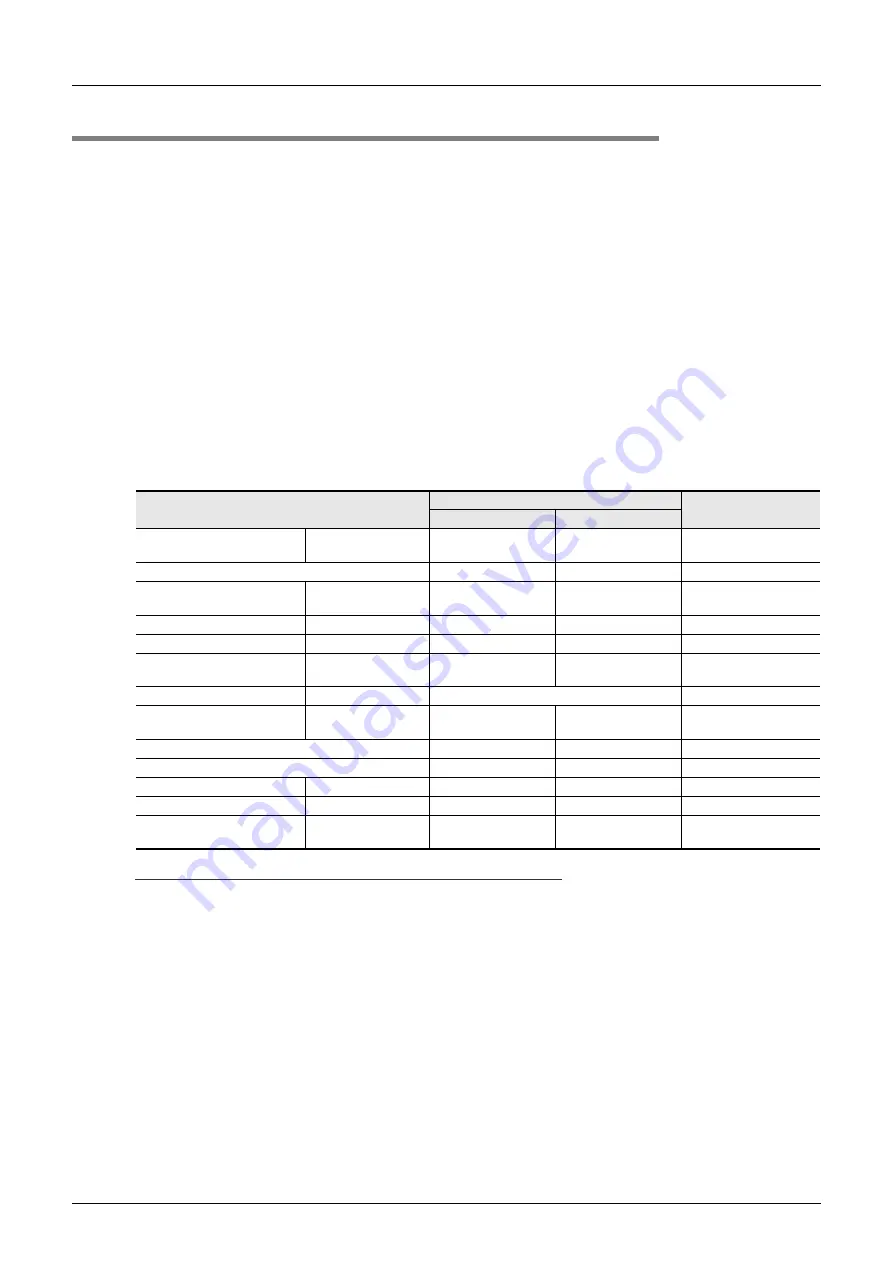
BFM Number
Data type
X-axis
Y-axis
Zero return interlock setting
enabled/disabled
Operation parameter 2 BFM #14002 b2
BFM #14202 b2
Positioning parameters
Mechanical zero-point address
BFM #14029,#14028
BFM #14229,#14228
Positioning parameters
Data-set type mechanical zero
return operation
Zero return mode
BFM #14031 = K1
BFM #14231 = K1
Positioning parameters
Forward rotation JOG
Operation command 1
BFM #518 b4
BFM #618 b4
Control data
Reverse rotation JOG
Operation command 1
BFM #518 b5
BFM #618 b5
Control data
Mechanical zero return
command
Operation command 1
BFM #518 b6
BFM #618 b6
Control data
Simultaneous START flag
Operation command 1
BFM #518 b10
Control data
Manual pulse generator
operation
Operation pattern
selection
BFM #520 b6
BFM #620 b6
Control data
Current address (user)
BFM #1,#0
BFM #101,#100
Monitor data
Current address (pulse)
BFM #3,#2
BFM #103,#102
Monitor data
Zero return complete
Status information
BFM #28 b3
BFM #128 b3
Monitor data
Zero phase passed
Servo status
BFM #63 b0
BFM #163 b0
Monitor data
Function selection C-4
Servo parameters
(Advanced setting)
BFM #15080
BFM #15280
Servo parameters