





























7 Before Starting Positioning Operation
95
FX
3U
-20SSC-H Positioning Block User's Manual
1
Int
roduct
ion
2
Sy
stem
conf
igur
ati
on
3
Exam
ple
C
onnect
ion
4
Ins
tall
a
tion
5
Wi
rin
g
6
Me
m
o
ry
confi
gur
at
ion
and da
ta
7
Befor
e
star
ting
positi
oning
contr
o
l
8
M
anual c
ont
ro
l
9
Posit
ioni
ng
C
ont
rol
10
Table O
per
at
ion
7.6 Changing During Operation (Operation Speed, Target Address)
Change procedure
1) Set the following bits to OFF in operation command 1.
- Change command in operation disabled
- Speed change command in positioning operation
2) Set the speed change value.
3) Set the speed change command in positioning operation to ON in operation command 1.
4) Set the following bits in the operation command 1 as follows when the During operation speed change
flag in the status information turns OFF from ON.
- Set the speed change command in positioning operation to OFF.
- Set the Change command in operation disabled flag to ON.
When unintended speed changes during operation are disabled except changes by change commands
(excluding speed changes using the override function)
4. Cautions for speed change
• When the Operation Speed Change function has been used along with the Remaining Travel Distance
operation mode, if STOP command is turned ON during positioning operation, the next operation speed is
defined by the changed speed.
• The operation speed can not change in the following statuses.
- When operation is started (that is, when the START command or START input is given)
At the start of operation, change the setting of operation speed 1, operation speed 2, jog speed
*1
and
zero return speed (high speed)
*1
before giving the START input (or command).
*1.
For the jog speed and zero return speed (high speed), change the positioning parameters.
→
For update of positioning parameters, refer to Subsection 7.1.7
- During deceleration by STOP command
- During automatic deceleration in position control
• If an operation speed larger than the maximum speed is specified for the speed change value, a setting
error occurs and the operation speed is controlled at the maximum speed.
• To change the speed at interpolation control, the speed change value has to be set in the X-axis setting.
• The operation speed does not change during mechanical zero return (at creep). The speed change
command is ignored.
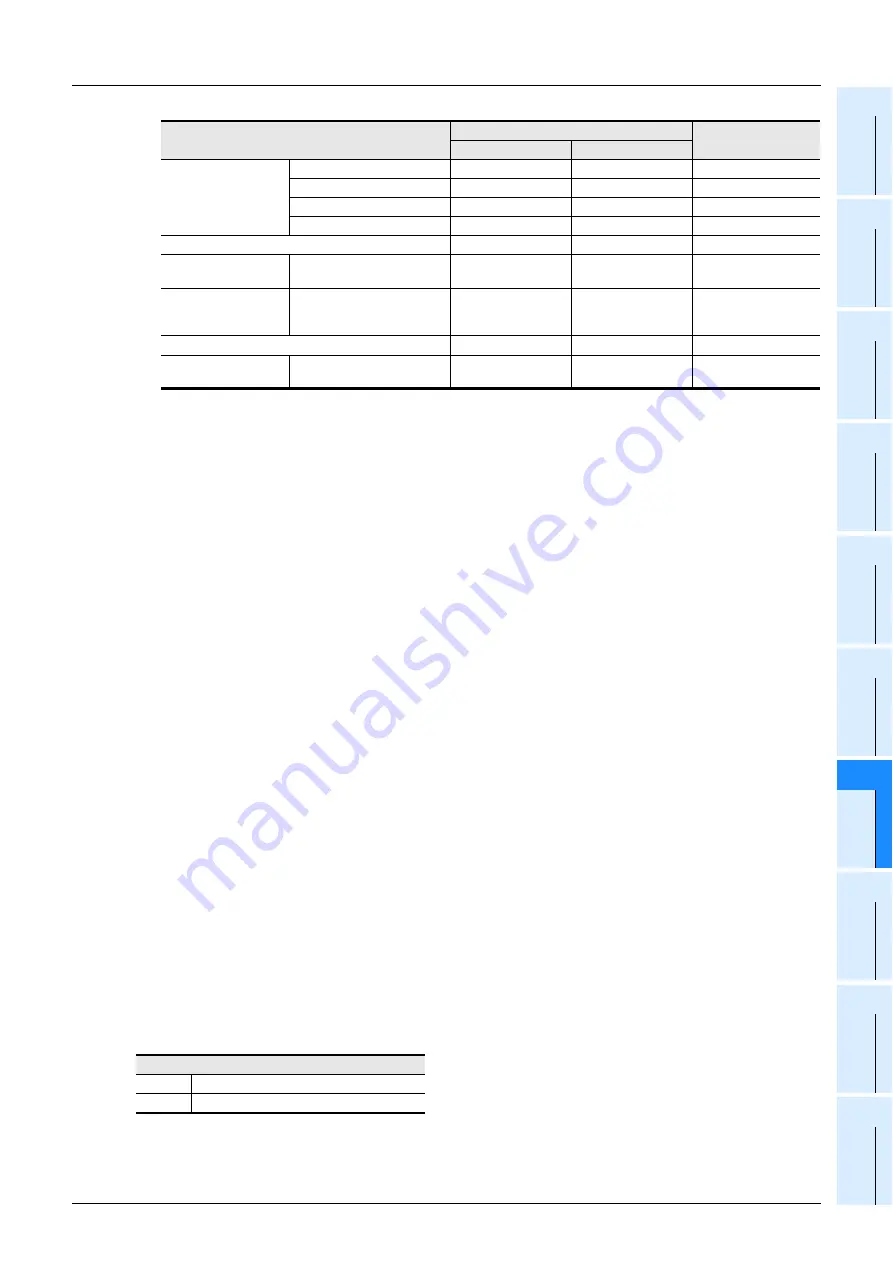
5. Program description example
In the following program, the operation speed is changed as follows.
BFM Number
Data type
X-axis
Y-axis
Operation speed setting
Operation speed 1
BFM #503,#502
BFM #603,#602
Control data
Operation speed 2
BFM #507,#506
BFM #607,#606
Control data
JOG speed
BFM #14013,#14012
BFM #14213,#14212
Positioning parameters
Zero return speed (high speed) BFM #14025,#14024
BFM #14225,#14224
Positioning parameters
Operation speed present value
BFM #11,#10
BFM #111,#110
Monitor data
Change command in
operation disabled
Operation command 1
BFM #518 b12
BFM #618 b12
Control data
Speed change
command in positioning
operation
Operation command 1
BFM #518 b13
BFM #618 b13
Control data
Speed change value
BFM #513,#512
BFM #613,#612
Control data
During operation speed
change
Status information
BFM #28 b13
BFM #128 b13
Monitor data
Contents of change
X-axis
Changes the operation speed to 2,000,000.
Y-axis
Changes the operation speed to 2,000,000.