




























3. SIGNALS AND WIRING
3 - 44
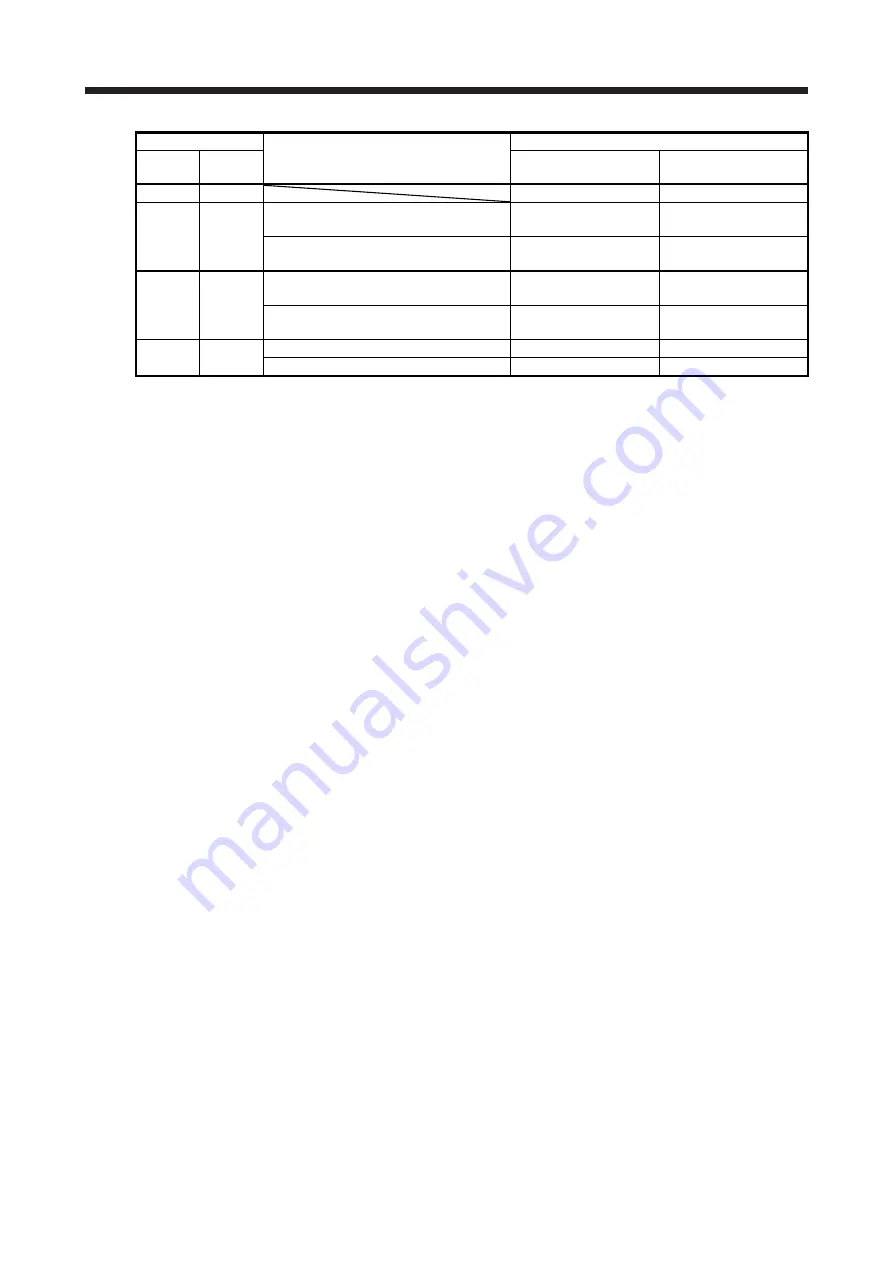
Input device (Note 1)
Limit value status
Enabled torque limit value
TL1 TL
CCW power running/CW
regeneration
CW power running/CCW
regeneration
0
0
Pr. PA11
Pr .PA12
0 1
TLA >
Pr. PA11
Pr. PA12
Pr. PA11
Pr. PA12
TLA <
Pr. PA11
Pr. PA12
TLA (Note 2)
TLA (Note 3)
1 0
Pr. PC35
>
Pr. PA11
Pr. PA12
Pr. PA11
Pr. PA12
Pr. PC35
<
Pr. PA11
Pr. PA12
Pr. PC35 (Note 2)
Pr. PC35 (Note 3)
1 1
TLA
>
Pr. PC35
Pr. PC35 (Note 2)
Pr. PC35 (Note 3)
TLA
<
Pr. PC35
TLA (Note 2)
TLA (Note 3)
Note 1. 0: Off
1: On
2. When "_ 2 _ _" is set in [Pr. PD33], the value set in [Pr. PA11] is applied. [Pr. PD33] is available with servo amplifiers
with software version B3 or later.
3. When "_ 1 _ _" is set in [Pr. PD33], the value set in [Pr. PA12] is applied. [Pr. PD33] is available with servo amplifiers
with software version B3 or later.
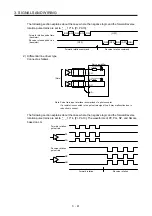
(c) TLC (Limiting torque)
TLC turns on when the servo motor torque reaches the torque limited using the forward rotation
torque limit, reverse rotation torque limit or analog torque limit.
Содержание MR-J4-100A(-RJ)
Страница 19: ...10 MEMO ...
Страница 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Страница 83: ...2 INSTALLATION 2 8 MEMO ...
Страница 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Страница 203: ...4 STARTUP 4 44 MEMO ...
Страница 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Страница 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Страница 387: ...9 DIMENSIONS 9 22 MEMO ...
Страница 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Страница 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Страница 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Страница 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Страница 856: ...APPENDIX App 41 ...
Страница 905: ...MEMO ...







































































