

























17. FULLY CLOSED LOOP SYSTEM
17 - 20
17.3.3 Fully closed loop control error detection functions
If fully closed loop control becomes unstable for some reason, the speed at servo motor side may increase
abnormally. The fully closed loop control error detection function is a protective function designed to pre-
detect it and stop operation.
The fully closed loop control error detection function has two different detection methods, speed deviation
and position deviation, and errors are detected only when the corresponding functions are enabled by setting
[Pr. PE03 Fully closed loop function selection 2].
The detection level setting can be changed using [Pr. PE06] and [Pr. PE07].
(1) Parameter
The fully closed loop control error detection function is selected.
Fully closed loop control error detection function
0: Disabled
1: Speed deviation error detection
2: Position deviation error detection
3: Speed deviation error, position deviation error detection
(Initial value)
0
0
0
[Pr. PE03]
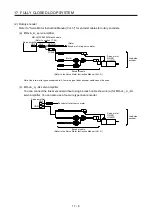
(2) Fully closed loop control error detection functions
Servo motor
Linear encoder
1) Servo motor-side feedback speed [r/min]
2) Servo motor-side feedback position [pulse]
(load side equivalent value)
3) Load-side feedback speed [r/min]
4) Load-side feedback position [pulse]
(a) Speed deviation error detection
Set [Pr. PE03] to "_ _ _ 1" to enable the speed deviation error detection.
Speed deviation error detection
1
[Pr. PE03]
The function compares the servo motor-side feedback speed (1)) and load-side feedback speed (3)).
If the deviation is not less than the set value (1 r/min to the permissible speed) of [Pr. PE06 Fully
closed loop control speed deviation error detection level], the function generates [AL. 42.2 Servo
control error by speed deviation] and stops the motor. The initial value of [Pr. PE06] is 400 r/min.
Change the set value as necessary.
Содержание MR-J4-100A(-RJ)
Страница 19: ...10 MEMO ...
Страница 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Страница 83: ...2 INSTALLATION 2 8 MEMO ...
Страница 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Страница 203: ...4 STARTUP 4 44 MEMO ...
Страница 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Страница 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Страница 387: ...9 DIMENSIONS 9 22 MEMO ...
Страница 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Страница 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Страница 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Страница 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Страница 856: ...APPENDIX App 41 ...
Страница 905: ...MEMO ...





















































