





























6. NORMAL GAIN ADJUSTMENT
6 - 22
6.2.3 Caution for one-touch tuning
(1) Caution common for user command method and amplifier command method
(a) The tuning is not available in the torque control mode.
(b) The one-touch tuning cannot be executed while an alarm or warning which does not continue the
motor driving is occurring.
(c) You can execute the one-touch tuning during the following test operation modes marked by " ".
How to one-touch tuning
Test operation mode
Output signal (DO) forced
output
JOG operation
Positioning
operation
Motor-less
operation
Program
operation
MR Configurator2
Push buttons
(d) If one-touch tuning is performed when the gain switching function is enabled, vibration and/or
unusual noise may occur during the tuning.
(2) Caution for amplifier command method
(a) Starting one-touch tuning while the servo motor is rotating displays "C006" at status in error code,
and the one-touch tuning cannot be executed.
(b) One-touch tuning is not available during the test operation mode. The following test operation modes
cannot be executed during one-touch tuning.
1) Positioning operation
2) JOG operation
3) Program operation
4) Machine analyzer operation
5) Single-step feed
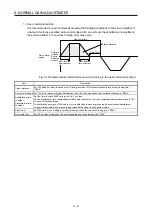
(c) During one-touch tuning, the permissible travel distance may be exceeded due to overshoot, set a
value sufficient to prevent machine collision.
(d) When Auto tuning mode 2, Manual mode, or 2 gain adjustment mode 2 is selected in [Pr. PA08 Auto
tuning mode], the load to motor inertia ratio will not be estimated. An optimum
acceleration/deceleration command will be generated by [Pr. PB06 Load to motor inertia ratio/load to
motor mass ratio] at the start of one-touch tuning. When the load to motor inertia ratio is incorrect,
the optimum acceleration/deceleration command may not be generated, causing the tuning to fail.
(e) When one-touch tuning is started by using communication, if the communication is interrupted during
the tuning, the servo motor will stop, and the tuning will also stop. The parameter will return to the
one at the start of the one-touch tuning.
(f) When one-touch tuning is started during the speed control mode, the mode will be switched to the
position control mode automatically. The tuning result may differ from the one obtained by executing
tuning by using the speed command.
Содержание MR-J4-100A(-RJ)
Страница 19: ...10 MEMO ...
Страница 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Страница 83: ...2 INSTALLATION 2 8 MEMO ...
Страница 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Страница 203: ...4 STARTUP 4 44 MEMO ...
Страница 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Страница 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Страница 387: ...9 DIMENSIONS 9 22 MEMO ...
Страница 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Страница 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Страница 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Страница 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Страница 856: ...APPENDIX App 41 ...
Страница 905: ...MEMO ...





















































