
























17. FULLY CLOSED LOOP SYSTEM
17 - 17
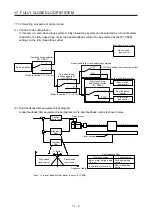
17.3.2 Home position return
(1) General instruction
Home position return is all performed according to the load-side encoder feedback data, independently
of the load-side encoder type. It is irrelevant to the Z-phase position of the servo motor encoder. In the
case of a home position return using a dog signal, the home position (reference mark) must be passed
through when an incremental type linear encoder is used, or the Z-phase be passed through when a
rotary encoder is used, during a period from a home position return start until the dog signal turns off.
For the linear encoder, a home position (reference mark) of the linear encoder is necessary in the home
position return direction.
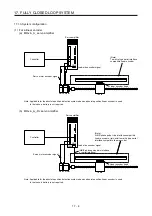
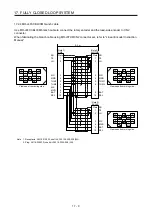
POINT
When you configure as follows, move the mover to LSN with JOG operation and
perform home position to perform it in safe.
LSN
LSP
Home position of linear encoder (reference mark)
Home position return direction
Non-returnable area:
Home position return cannot be performed
when started from this area.
Returnable area:
Home position return can be performed
when started from this area.
Dog
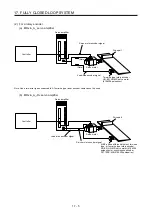
(2) Load-side encoder types and home position return methods
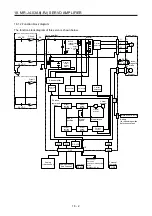
(a) About proximity dog type home position return using absolute type linear encoder
When an absolute type linear encoder is used, the home position standard position is the position
per servo motor revolution to the linear encoder home position (absolute position data = 0).
In the case of a proximity dog type home position return, the nearest position after proximity dog off
is the home position.
The linear encoder home position may be set in any position.
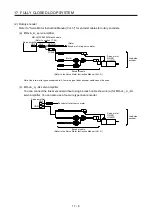
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Servo motor
speed
Reference home
position
Machine position
0 r/min
Equivalent to one servo motor revolution
Содержание MR-J4-100A(-RJ)
Страница 19: ...10 MEMO ...
Страница 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Страница 83: ...2 INSTALLATION 2 8 MEMO ...
Страница 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Страница 203: ...4 STARTUP 4 44 MEMO ...
Страница 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Страница 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Страница 387: ...9 DIMENSIONS 9 22 MEMO ...
Страница 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Страница 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Страница 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Страница 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Страница 856: ...APPENDIX App 41 ...
Страница 905: ...MEMO ...





















































