




























5. PARAMETERS
5 - 52
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control
mode
P S T
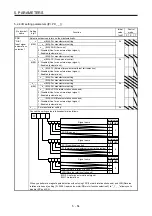
PC45
*COPA
Function
selection C-A
_ _ _ X Encoder pulse count polarity selection
Select a polarity of the linear encoder or load-side encoder.
0: Encoder pulse increases in the servo motor CCW or positive direction.
1: Encoder pulse decreases in the servo motor CCW or positive direction.
This digit is not available with MR-J4-03A6(-RJ) servo amplifiers.
0h
_ _ X _ For manufacturer setting
0h
_ X _ _ Selection of A/B/Z-phase input interface encoder Z-phase connection judgment
function
Select the non-signal detection status for the pulse train signal from the A/B/Z-phase
input interface encoder used as a linear encoder or load-side encoder.
This function is enabled only when you use an A/B/Z-phase input interface encoder.
This digit is not available with MR-J4-03A6(-RJ) servo amplifiers.
0h
Setting
value
Detection of
disconnection
Alarm status
Z-phase-side non-
signal
Fully closed
loop system
Linear servo
system
0
Enabled
[AL. 71.6]
(Z-phase)
[AL. 20.6]
(Z-phase)
1
Disabled
X _ _ _ For manufacturer setting
0h
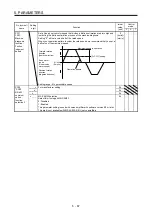
PC51
RSBR
Forced stop
deceleration
time constant
Set deceleration time constant when you use the forced stop deceleration function.
Set the time per ms from the rated speed to 0 r/min or 0 mm/s. Setting "0" will be
100 ms.
Forced stop deceleration
[Pr. PC51]
0 r/min
Servo motor speed
Rated speed
Dynamic brake
deceleration
(Linear servo
motor speed)
(0 mm/s)
[Precautions]
If the servo motor torque or linear servo motor thrust is saturated at the maximum
value during forced stop deceleration because the set time is too short, the time
to stop will be longer than the set time constant.
[AL. 50 Overload alarm 1] or [AL. 51 Overload alarm 2] may occur during forced
stop deceleration, depending on the set value.
After an alarm that leads to a forced stop deceleration, if an alarm that does not
lead to a forced stop deceleration occurs or if the control circuit power supply is
cut, dynamic braking will start regardless of the deceleration time constant setting.
Setting range: 0 to 20000
100
[ms]
Содержание MR-J4-100A(-RJ)
Страница 19: ...10 MEMO ...
Страница 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Страница 83: ...2 INSTALLATION 2 8 MEMO ...
Страница 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Страница 203: ...4 STARTUP 4 44 MEMO ...
Страница 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Страница 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Страница 387: ...9 DIMENSIONS 9 22 MEMO ...
Страница 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Страница 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Страница 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Страница 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Страница 856: ...APPENDIX App 41 ...
Страница 905: ...MEMO ...







































































