















19. MR-D01 EXTENSION I/O UNIT
19 - 35
(5) Torque limit
CAUTION
If the torque limit is canceled during servo-lock, the servo motor may suddenly
rotate according to position deviation in respect to the command position.
When using the torque limit, check that [Pr. PB06 Load to motor inertia ratio] is
set properly. Improper settings may cause an unexpected operation such as an
overshoot.
POINT
To use OTLA (Analog torque limit), set [Pr. Po11] to "_ 1 _ _".
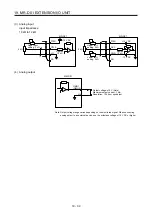
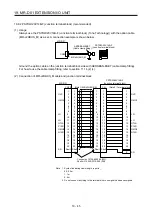
(a) Torque limit and torque
By setting [Pr. PA11 Forward rotation torque limit] or [Pr. PA12 Reverse rotation torque limit], torque
is always limited to the maximum value during operation. A relation between the limit value and
servo motor torque is as follows.
Torque limit value
in [Pr. PA11]
Maximum
torque
T
orque
0
100 [%]
Torque limit value
in [Pr. PA12]
100
CCW direction
CW direction
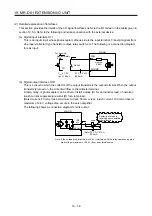
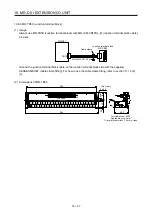
A relation between the applied voltage of OTLA (Analog torque limit) and the torque limit value of the
servo motor is as follows. Torque limit values will vary about 5% relative to the voltage depending on
products. At the voltage of less than 0.05 V, torque may vary as it may not be limited sufficiently.
Therefore, use this function at the voltage of 0.05 V or more.
(Note)
±5%
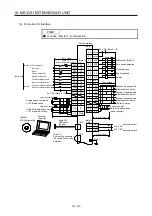
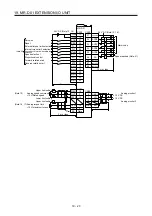
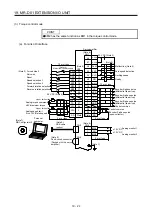
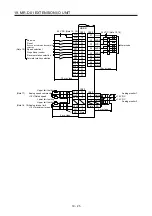
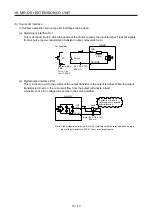
Connection example
Equivalent to RRS10
(Japan Resistor)
OTLA applied voltage vs. torque limit value
OTLA applied voltage [V]
Maximum torque
T
or
que
0
0
0.05
TL
DICOMD
P15R
OTLA
LG
SD
MR-D01
2 k
Ω
2 k
Ω
24 V DC
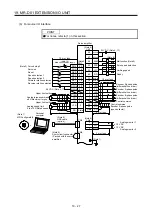
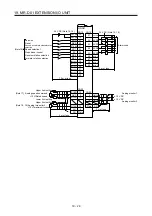
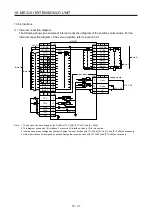
Note. This diagram shows sink I/O interface. For source I/O interface, refer to section
19.5.4 (5).
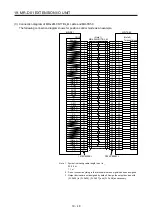
(b) Torque limit value selection
The following shows how to select a torque limit using TL (External torque limit selection) from [Pr.
PA11 Forward torque limit] or [Pr. PA12 Reverse torque limit] and OTLA (Analog torque limit).
When TL1 (Internal torque limit selection) is enabled with [Pr. Po02] to [Pr. Po07], [Pr. Po27], and
[Pr. Po28], you can select [Pr. PC35 internal torque limit 2/Internal thrust limit 2].
However, if [Pr. PA11] and [Pr. PA12] value is less than the limit value selected by TL/TL1, [Pr.
PA11] and [Pr. PA12] value will be enabled.
Содержание MR-J4-100A(-RJ)
Страница 19: ...10 MEMO ...
Страница 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Страница 83: ...2 INSTALLATION 2 8 MEMO ...
Страница 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Страница 203: ...4 STARTUP 4 44 MEMO ...
Страница 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Страница 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Страница 387: ...9 DIMENSIONS 9 22 MEMO ...
Страница 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Страница 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Страница 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Страница 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Страница 856: ...APPENDIX App 41 ...
Страница 905: ...MEMO ...







































































