





























13. USING A LINEAR SERVO MOTOR
13 - 77
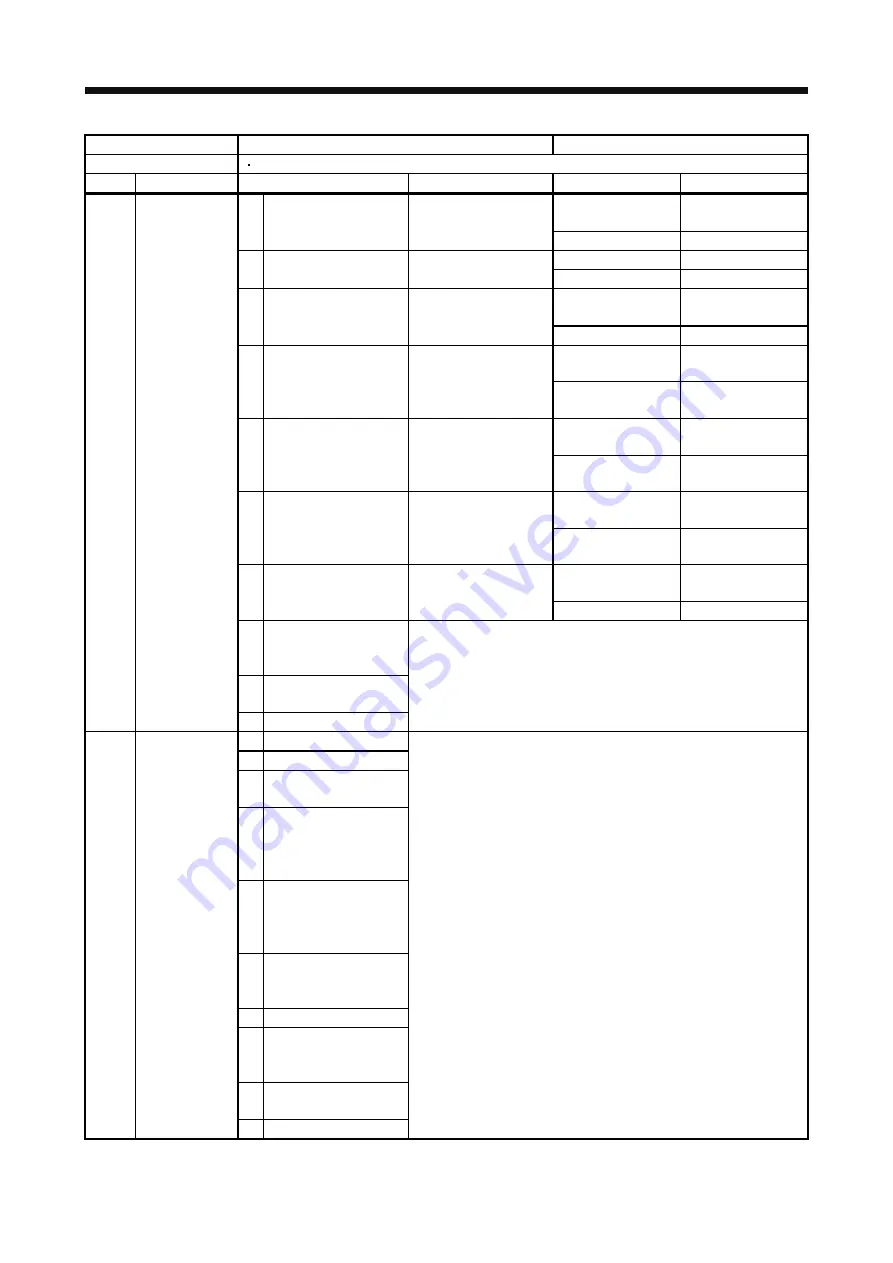
Alarm No.50
Name: Overload 1
Stop method: Corresponding axis stops
Alarm description
Load exceeds overload protection characteristic of servo amplifier.
Display Name
Cause
Checkpoint
Finding
Action
50.5
(1) Machine struck something. Check if the machine
struck something.
Machine struck.
Review the operation
pattern.
Thermal overload
error 2 during a
stop
Machine did not strike. Check (2).
(2) Power cable is cut.
Check the power cable.
Problem found.
Modify the wiring.
No problem found.
Check (3).
(3)
Check the wiring of U, V
and W phases.
Problem found.
Perform wiring
correctly.
Incorrect connections
to/from the linear servo
motor.
No problem found.
Check (4).
(4)
Setting is incorrect.
Correct the setting.
Resolution of the linear
encoder and the
resolution setting of the
parameter are different.
Review the parameter
No.PS02 and PS03
settings.
Setting is correct.
Check (5).
(5)
The polarity is
incorrect.
Correct the setting.
Polarity of the linear
encoder is incorrect.
(Installation direction is
incorrect.)
Check polarities of the
linear encoder and the
linear servo motor.
Normal. Check
(6).
(6)
Not reproduced.
Perform the magnetic
pole detection.
Initial magnetic pole
detection is not
performed.
Perform the magnetic
pole detection again, and
check the reproducibility
of the error.
Reproduced. Check
(7).
(7) Linear encoder is faulty.
Not reproduced.
Replace the servo
motor.
Replace the servo motor,
and check the
reproducibility of the error. Reproduced. Check
(8).
(8) Servo amplifier is used in
excess of its continuous
output current.
Examine checkpoints described in the alarm display "50.4".
(9) Servo system is instable
and causing oscillation.
(10) Servo amplifier is faulty.
50.6
(1) Machine struck something. Examine checkpoints described in the alarm display "50.5".
(2) Power cable is cut.
Thermal overload
error 4 during
operation
(3) Incorrect
connections
to/from the servo motor.
(4) Resolution of the linear
encoder and the
resolution setting of the
parameter are different.
(5) Polarity of the linear
encoder is incorrect.
(Installation direction is
incorrect.)
(6) Initial magnetic pole
detection is not
performed.
(7) Linear encoder is faulty.
(8) Servo amplifier is used in
excess of its continuous
output current.
(9) Servo system is instable
and causing oscillation.
(10) Servo amplifier is faulty.
Содержание MELSERVO-J3W Series
Страница 17: ...8 MEMO ...
Страница 27: ...1 FUNCTIONS AND CONFIGURATION 1 10 MEMO ...
Страница 87: ...4 STARTUP 4 14 MEMO ...
Страница 117: ...5 PARAMETERS 5 30 MEMO ...
Страница 129: ...6 GENERAL GAIN ADJUSTMENT 6 12 MEMO ...
Страница 185: ...10 CHARACTERISTICS 10 8 MEMO ...
Страница 241: ...11 OPTIONS AND AUXILIARY EQUIPMENT 11 56 MEMO ...
Страница 274: ...13 USING A LINEAR SERVO MOTOR 13 25 1 2 3 4 ...







































































