





























9 - 118
Chapter 9 Major Positioning Control
(3) The error "Outside new current value range" (error code: 514) will occur and
the operation cannot start if "degree" is set in "[Pr.1] Unit setting" and the
value set in "[Da.6] Positioning address/movement amount (0 to 359.99999
[degree])" is outside the setting range.
(4) If the value set in "[Da.6] Positioning address/movement amount" is outside
the software stroke limit ([Pr.12], [Pr.13]) setting range, the error "Software
stroke limit +" (error code: 507) or "Software stroke limit -" (error code: 508)
will occur at the positioning start, and the operation will not start.
(5) The error "Software stroke limit +" (error code: 507) or "Software stroke limit -"
(error code: 508) will occur if the new current value is outside the software
stroke limit range.
(6) The new current value using the positioning data (No.1 to 600) cannot be
changed, if "0: Positioning control is not executed" is set in "[Pr.55] Operation
setting for incompletion of HPR" and "HPR request flag" ON. The error "Start
at HPR incomplete" (error code: 547) will occur.
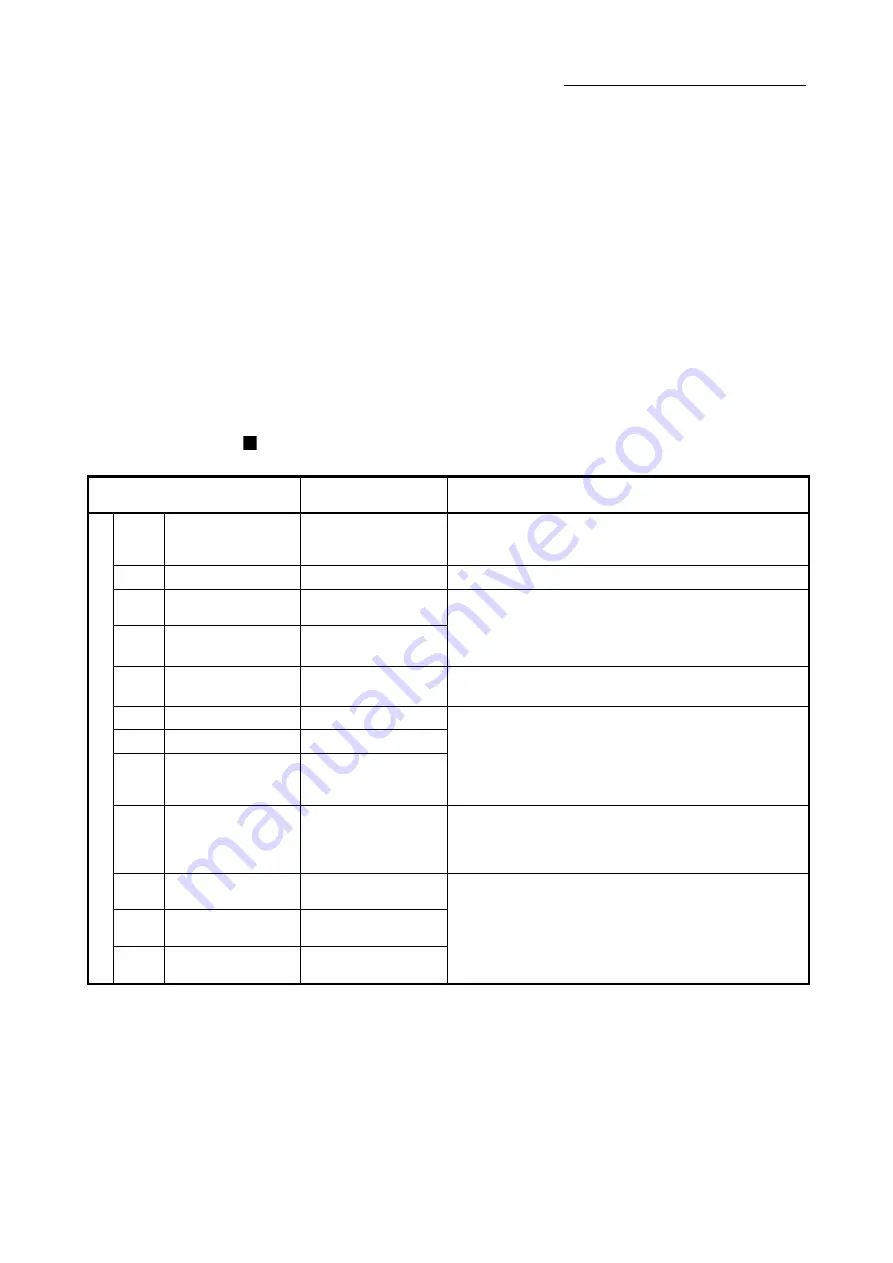
Positioning data setting examples
[When "current value changing" is set in the positioning data No. 1 of axis 1]
Setting item
Setting example
Setting details
Axis 1
Pos
itioning d
ata N
o. 1
[Da.1] Operation pattern
Positioning complete
Set "Positioning complete" assuming that the next positioning
data will be executed. ("Continuous path control" cannot be
set by current value change.)
[Da.2]
Control method
Current value changing Set the current value changing.
[Da.3]
Acceleration time No.
–
Setting not required (Setting value is ignored.)
[Da.4]
Deceleration time No.
–
[Da.6]
Positioning address/
movement amount
10000.0
m
Set the address to which address change is desired.
(Assuming that the "[Pr.1] Unit setting" is set to "mm".)
[Da.7]
Arc address
–
Setting not required (Setting value is ignored.)
[Da.8]
Command speed
–
[Da.9]
Dwell time/JUMP
destination positioning
data No.
–
[Da.10]
M code/Condition
data No./Number of
LOOP to LEND
repetitions
10
Set this when other sub operation commands are issued in
combination with the No.1 positioning data.
[Da.20]
Axis to be interpolated
No.1
–
Setting not required (setting value is ignored).
[Da.21]
Axis to be interpolated
No.2
–
[Da.22]
Axis to be interpolated
No.3
–
(Note): Refer to Section 5.3 "List of positioning data" for information on the setting details.
Содержание MELSEC Q Series
Страница 1: ...MELSEC Q QD77GF Simple Motion Module User s Manual Positioning Control QD77GF4 QD77GF8 QD77GF16 ...
Страница 2: ......
Страница 30: ...A 28 MEMO ...
Страница 32: ...MEMO ...
Страница 97: ...3 29 Chapter 3 Specifications and Functions MEMO ...
Страница 102: ...3 34 Chapter 3 Specifications and Functions MEMO ...
Страница 282: ...5 162 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 374: ...7 16 Chapter 7 Memory Configuration and Data Process MEMO ...
Страница 376: ...MEMO ...
Страница 400: ...8 24 Chapter 8 HPR Control MEMO ...
Страница 425: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Страница 528: ...9 128 Chapter 9 Major Positioning Control MEMO ...
Страница 554: ...10 26 Chapter 10 High Level Positioning Control MEMO ...
Страница 586: ...11 32 Chapter 11 Manual Control MEMO ...
Страница 800: ...16 54 Chapter 16 Troubleshooting MEMO ...
Страница 829: ...Appendix 29 Appendices 3 QD77GF16 Unit mm inch 115 4 53 3 0 12 23 0 91 27 4 1 08 98 3 86 4 0 16 ...
Страница 830: ...Appendix 30 Appendices MEMO ...
Страница 833: ......







































































