





























9 - 19
Chapter 9 Major Positioning Control
POINT
(1) When the upper/lower limit value of the axis which set the software stroke limit
as valid are changed, perform the machine HPR after that.
(2) When the software stroke limit is set as valid in the incremental data system,
perform the machine HPR after power supply on.
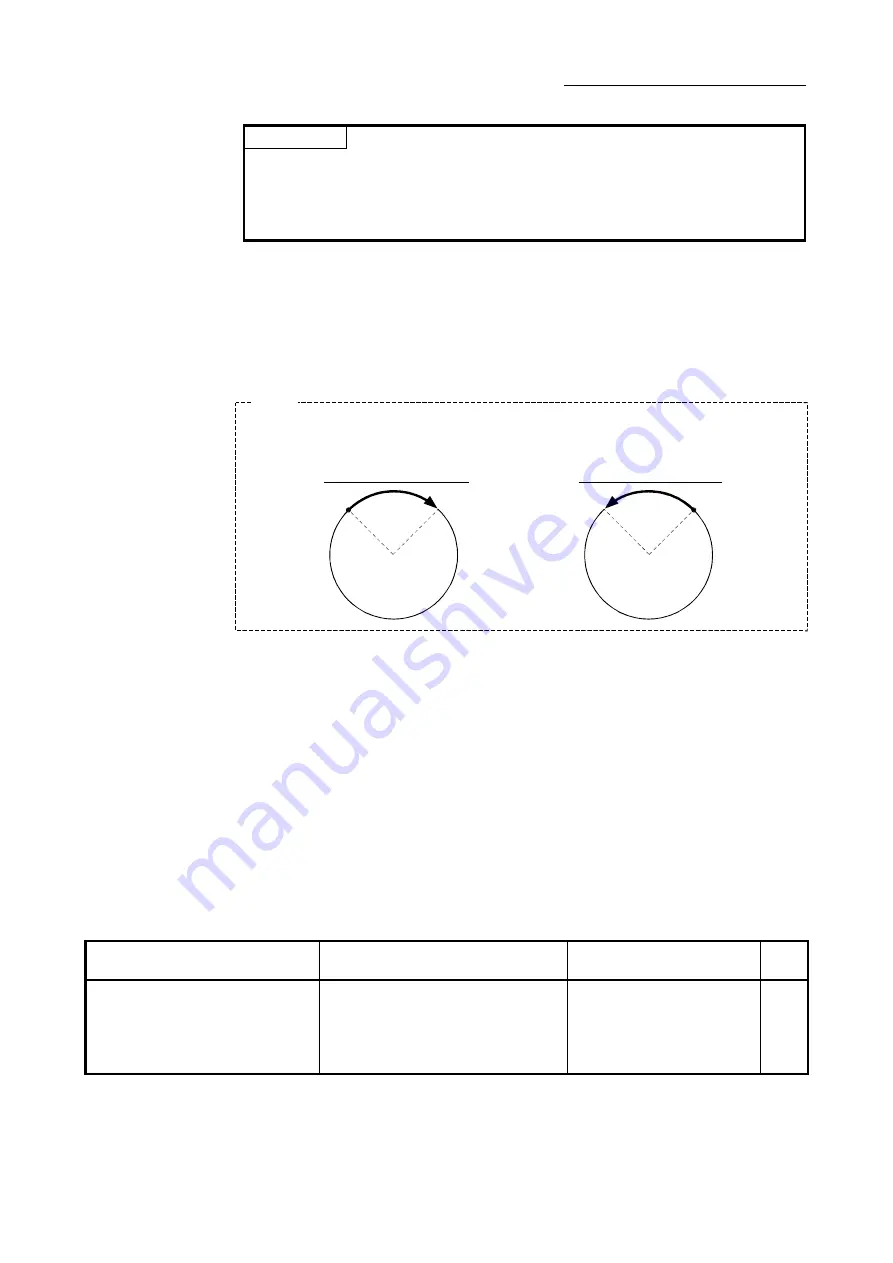
[3] Positioning control method when the control unit is set to "degree"
1) Absolute system
(a) When the software stroke limit is invalid
Positioning is carried out in the nearest direction to the designated
address, using the current value as a reference.
(This is called "shortcut control".)
Example
1) Positioning is carried out in a clockwise direction when the current value is moved from 315° to 45°.
2) Positioning is carried out in a counterclockwise direction when the current value is moved from 45° to 315°.
315°
45°
315°
45°
1) Moved from 315° to 45°
2) Moved from 45° to 315°
To designate the positioning direction (not carrying out the shortcut control), the
shortcut control is invalidated and positioning in a designated direction is carried out by
the "[Cd.40] ABS direction in degrees".
This function can perform only when the software stroke limit is invalid. When the
software stroke limit is valid, the error "Illegal setting of ABS direction in unit of degree"
(error code: 546) occurs and positioning is not started.
To designate the movement direction in the ABS control, a "1" or "2" is written to the
"[Cd.40] ABS direction in degrees" of the buffer memory (initial value: 0).
The value written to the "[Cd.40] ABS direction in degrees" becomes valid only when
the positioning control is started.
In the continuous positioning control and continuous path control, the operation is
continued with the setting set at the time of start even if the setting is changed during
the operation.
Name
Function
Buffer memory address
Initial
value
[Cd.40] ABS direction in degrees
The ABS movement direction in the unit
of degree is designated.
0: Shortcut (direction setting invalid)
1: ABS clockwise
2: ABS counterclockwise
4350+100n 0
Содержание MELSEC Q Series
Страница 1: ...MELSEC Q QD77GF Simple Motion Module User s Manual Positioning Control QD77GF4 QD77GF8 QD77GF16 ...
Страница 2: ......
Страница 30: ...A 28 MEMO ...
Страница 32: ...MEMO ...
Страница 97: ...3 29 Chapter 3 Specifications and Functions MEMO ...
Страница 102: ...3 34 Chapter 3 Specifications and Functions MEMO ...
Страница 282: ...5 162 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 374: ...7 16 Chapter 7 Memory Configuration and Data Process MEMO ...
Страница 376: ...MEMO ...
Страница 400: ...8 24 Chapter 8 HPR Control MEMO ...
Страница 425: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Страница 528: ...9 128 Chapter 9 Major Positioning Control MEMO ...
Страница 554: ...10 26 Chapter 10 High Level Positioning Control MEMO ...
Страница 586: ...11 32 Chapter 11 Manual Control MEMO ...
Страница 800: ...16 54 Chapter 16 Troubleshooting MEMO ...
Страница 829: ...Appendix 29 Appendices 3 QD77GF16 Unit mm inch 115 4 53 3 0 12 23 0 91 27 4 1 08 98 3 86 4 0 16 ...
Страница 830: ...Appendix 30 Appendices MEMO ...
Страница 833: ......







































































