





























13 - 12
Chapter 13 Control Sub Functions
[2] Precautions during control
(1) The feed command of the backlash compensation amount are not added to
the "[Md.20] Feed current value" or "[Md.21] Feed machine value".
(2) Always carry out a machine HPR before starting the control when using the
backlash compensation function (when "[Pr.11] Backlash compensation
amount" is set). The backlash in the mechanical system cannot be correctly
compensated if a machine HPR is not carried out.
(3) Backlash compensation, which includes the movement amount and "[Pr.11]
Backlash compensation amount", is output the moment at the moving
direction changes.
(4) Backlash compensation cannot be made during the speed control mode or
torque control mode.
(5) Whether the backlash compensation is necessary or not is judged from
"[Pr.44] HPR direction" of the Simple Motion module in the axis operation
such as positioning after the HPR.
When the positioning is executed in the same direction as "[Pr.44] HPR
direction", the backlash compensation is not executed. However, when the
positioning is executed in the reverse direction against "[Pr.44] HPR
direction", the backlash compensation is executed.
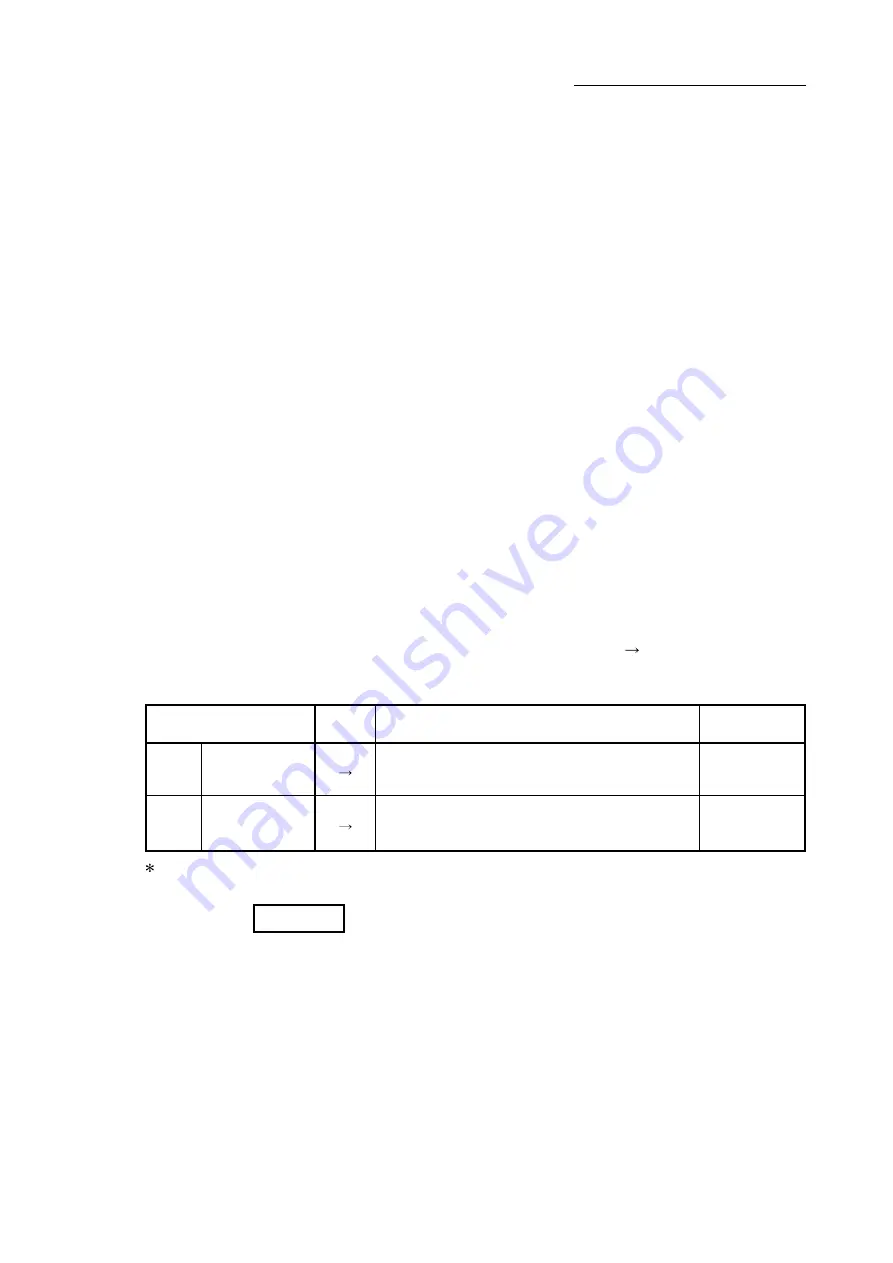
[3] Setting the backlash compensation function
To use the "backlash compensation function", set the "backlash compensation
amount" in the parameter shown in the following table, and write it to the Simple
Motion module.
The set details are validated at the rising edge (OFF
ON) of the PLC READY
signal [Y0].
Setting item
Setting
value
Setting details
Factory-set
initial value
[Pr.11]
Backlash
compensation
amount
Set the backlash compensation amount.
0
[Pr.44] HPR direction
Set the same direction as the last HPR direction set in
the servo amplifier when using the driver HPR.
[CiA402 mode]
0
: Refer to Section 5.2 "List of parameters" for setting details.
REMARK
Parameters are set for each axis.
It is recommended that the parameters be set whenever possible with GX Works2.
Execution by sequence program uses many sequence programs and devices. The
execution becomes complicated, and the scan times will increase.
Содержание MELSEC Q Series
Страница 1: ...MELSEC Q QD77GF Simple Motion Module User s Manual Positioning Control QD77GF4 QD77GF8 QD77GF16 ...
Страница 2: ......
Страница 30: ...A 28 MEMO ...
Страница 32: ...MEMO ...
Страница 97: ...3 29 Chapter 3 Specifications and Functions MEMO ...
Страница 102: ...3 34 Chapter 3 Specifications and Functions MEMO ...
Страница 282: ...5 162 Chapter 5 Data Used for Positioning Control MEMO ...
Страница 374: ...7 16 Chapter 7 Memory Configuration and Data Process MEMO ...
Страница 376: ...MEMO ...
Страница 400: ...8 24 Chapter 8 HPR Control MEMO ...
Страница 425: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Страница 528: ...9 128 Chapter 9 Major Positioning Control MEMO ...
Страница 554: ...10 26 Chapter 10 High Level Positioning Control MEMO ...
Страница 586: ...11 32 Chapter 11 Manual Control MEMO ...
Страница 800: ...16 54 Chapter 16 Troubleshooting MEMO ...
Страница 829: ...Appendix 29 Appendices 3 QD77GF16 Unit mm inch 115 4 53 3 0 12 23 0 91 27 4 1 08 98 3 86 4 0 16 ...
Страница 830: ...Appendix 30 Appendices MEMO ...
Страница 833: ......







































































