





























Chapter 11 Motion Control Instructions
11-185
11
About MC_CamIn Instruction
MC_CamIn
Execution Process
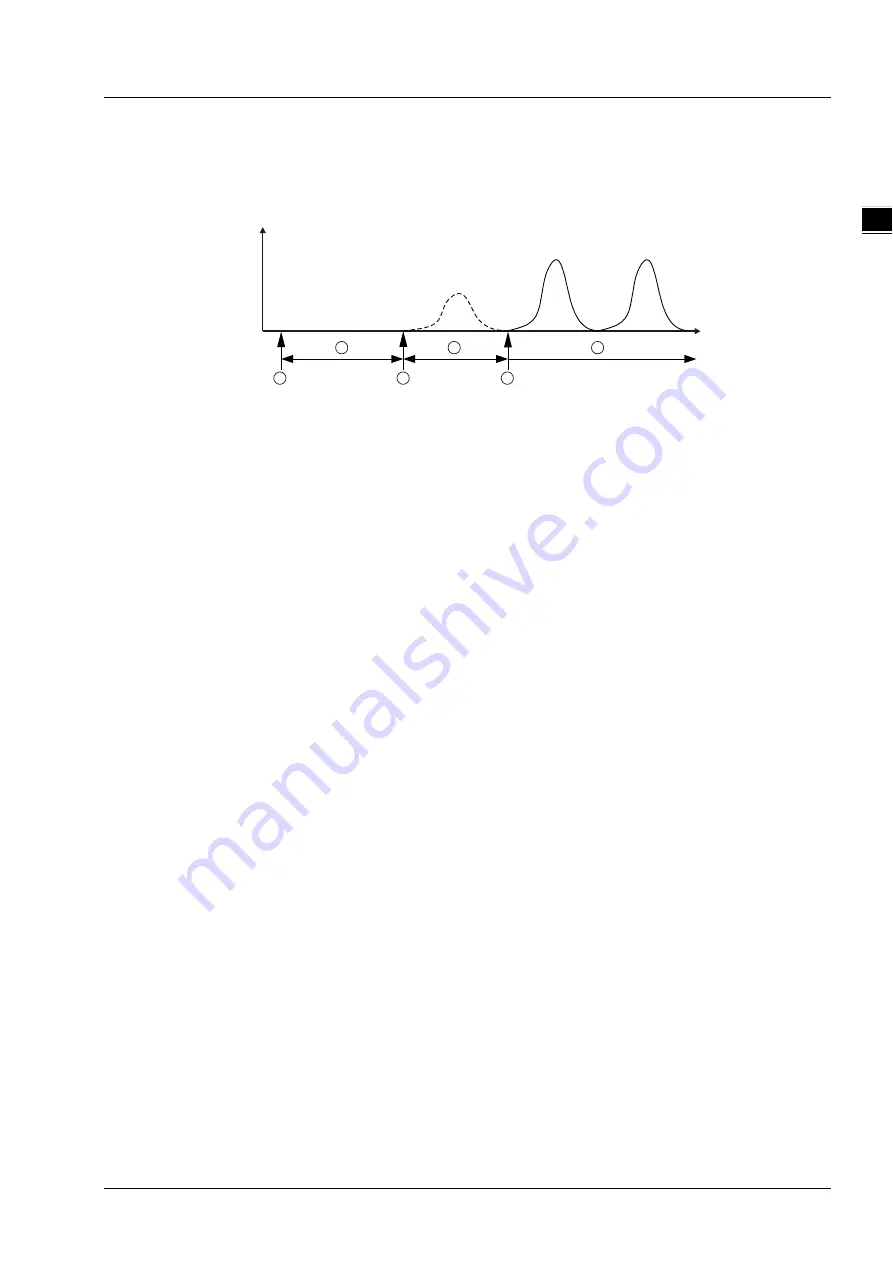
The MC_CamIn execution process figure:
S la ve ax is pos ition
Mas ter ax is po sition
MC_CamIn Exe cut ion Proc es s
1
2
3
4
5
6
Stage 1:
Trigger and execute the MC_CamIn instruction.
Stage 2:
Wait for the start of the engagement.
Stage 3:
The slave axis starts to perform the engagement action as the master axis reaches
the position where the engagement starts.
Stage 4:
The engagement is ongoing.
Stage 5:
The master axis and slave axis achieve the synchronization as the engagement is
completed.
Stage 6:
The master axis and slave axis are in the synchronous motion.
Stage 1:
Trigger and execute the MC_CamIn instruction.
The
MC_CamIn
instruction is executed at this time and then the slave will enter the state of
waiting for the start of the engagement immediately.
NOTE:
If
ActivationPosition
=
0
and
ActivationMode
=
0 (relative axis position), the slave axis
will move from current speed to SYNC speed. Except in the case above, the slave axis will
stop moving immediately! All set input parameters of the
MC_CamIn
instruction will be read
and retained for use in the execution.
Stage 2:
Wait for the start of the engagement.
The slave axis waits for the timing for performing the engagement action in the standstill
state. The time to start the engagement is when the master axis passes the position
specified by the parameter
ActivationPosition
. In different circumstances, the period of time
the slave axis waits for is different. If the master axis is at the position specified by
ActivationPosition
as the
MC_CamIn
instruction is executed, the slave axis starts the
engagement action immediately. If the master axis never reaches the position specified by
ActivationPosition,
the slave axis will never start to perform the engagement action and the
cam synchronization will never come true. The parameters
ActivationPosition
and
ActivationMode
are used at this stage.
Stage 3:
The slave axis starts to perform the engagement action when the master axis
passes the position specified by
ActivationPosition.
The parameters,
MasterAbsolute,
SlaveAbsolute
,
MasterOffset
,
SlaveOffset
,
MasterScaling
and
SlaveScaling
will work at the
moment for making sure of the corresponding relationship between the master axis position
and slave axis position and the cam phase.
Stage 4:
The engagement is ongoing.
The slave axis performs the engagement in the way specified by the
StartMode
parameter.
Besides
StartMode,
the parameters
Velocity, Acceleration
and
Deceleration
also works at this
stage. The motion features about velocity, acceleration/ deceleration of the slave axis are
determined by these parameters in the engagement.
Stage 5:
The engagement is completed and the master axis and slave axis achieve the
synchronization.
Содержание DVP-15MC Series
Страница 16: ...1 1 1 Preface Table of Contents 1 1 Explanation of Symbols in This Manual 1 2 1 2 Revision History 1 3...
Страница 19: ...DVP 15MC Series Motion Controller Operation Manual 1 4 _1 MEMO...
Страница 20: ...2 1 2 Overview Table of Contents 2 1 Product Description 2 2 2 2 Functions 2 2 2 3 Profile and Components 2 3...
Страница 23: ...DVP 15MC Series Operation Manual 2 4 _2 MEMO...
Страница 31: ...DVP 15MC Series Motion Controller Operation Manual 3 8 _3 MEMO...
Страница 75: ...DVP 15MC Series Motion Controller Operation Manual 6 26 _6 MEMO...
Страница 87: ...DVP 15MC Series Motion Controller Operation Manual 7 12 _7 MEMO...
Страница 432: ...Chapter 8 Logic Instructions 8 345 8_ MEMO...
Страница 433: ...9 1 9 Chapter 9 Introductions of Axis Parameters Table of Contents 9 1 Description of Axis Parameters 9 2...
Страница 470: ...DVP 15MC Series Motion Controller Operation Manual 10 34 10 MEMO...
Страница 878: ...DVP 15MC Series Motion Controller Operation Manual 11 408 11 1 MEMO...
Страница 920: ...DVP 15MC Series Motion Controller Operation Manual A 16 A MEMO...
Страница 941: ...D 1 D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2...
Страница 966: ...DVP 15MC Series Motion Controller Operation Manual D 26 D MEMO...







































































