





























5. PARAMETERS
5 - 26
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control
mode
P S T
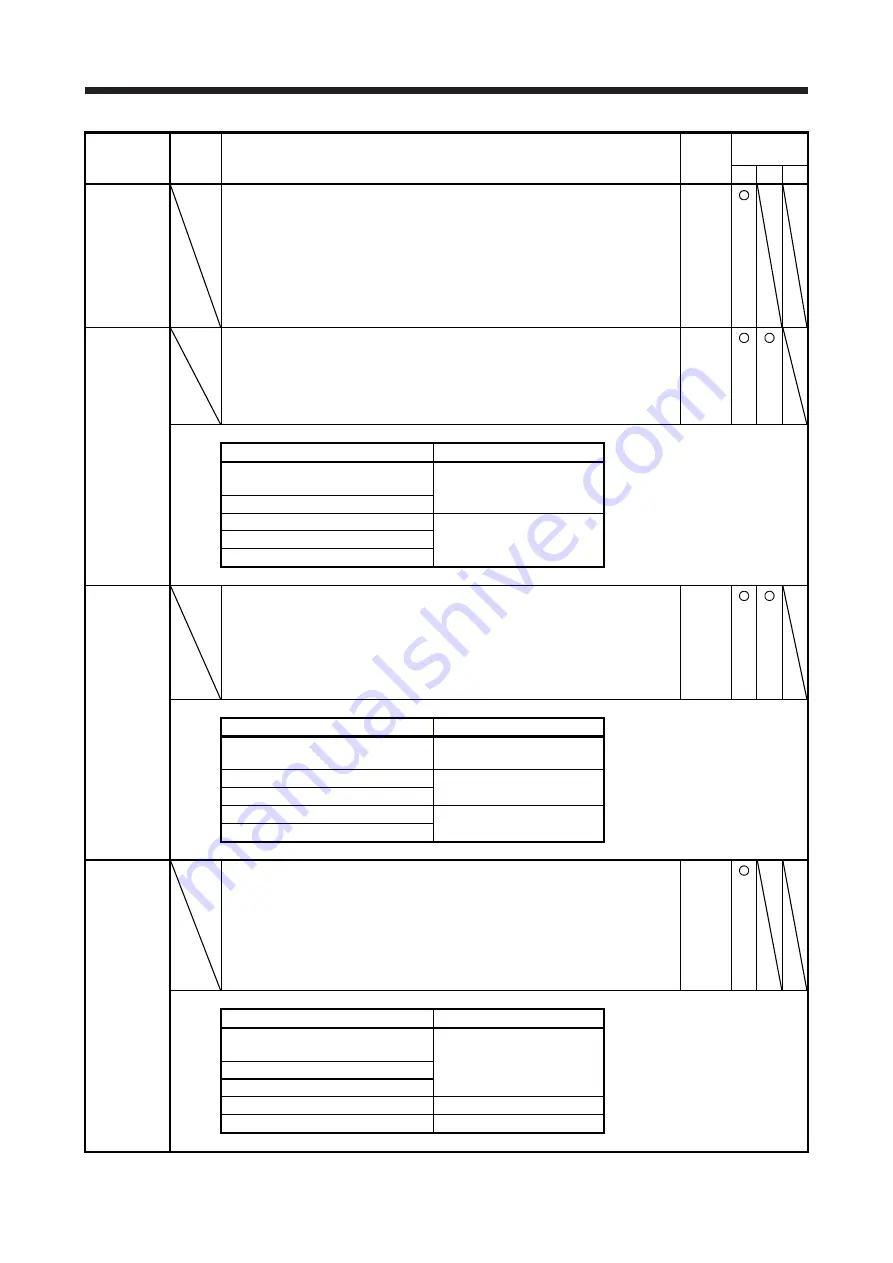
PB04
FFC
Feed forward
gain
Set the feed forward gain.
When the setting is 100%, the droop pulses during operation at constant speed are
nearly zero. When the super trace control is enabled, constant speed and uniform
acceleration/deceleration droop pulses will be almost 0. However, sudden
acceleration/deceleration will increase the overshoot. As a guideline, when the feed
forward gain setting is 100%, set 1 s or more as the acceleration time constant up to
the rated speed.
Setting range: 0 to 100
0
[%]
PB06
GD2
Load to motor
inertia ratio/
load to motor
mass ratio
Set the load to motor inertia ratio or load to motor mass ratio.
The setting of the parameter will be the automatic setting or manual setting
depending on the [Pr. PA08] setting. Refer to the following table for details. When
the parameter is automatic setting, the value will vary between 0.00 and 100.00.
Setting range: 0.00 to 300.00
7.00
[Multiplier]
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1
(interpolation mode))
Automatic setting
_ _ _ 1: (Auto tuning mode 1)
_ _ _ 2: (Auto tuning mode 2)
Manual setting
_ _ _ 3 (Manual mode)
_ _ _ 4: (2 gain adjustment mode 2)
PB07
PG1
Model loop
gain
Set the response gain up to the target position.
Increasing the setting value will also increase the response level to the position
command but will be liable to generate vibration and/or noise.
The setting of the parameter will be the automatic setting or manual setting
depending on the [Pr. PA08] setting. Refer to the following table for details.
Setting range: 1.0 to 2000.0
15.0
[rad/s]
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1
(interpolation mode))
Manual setting
_ _ _ 1: (Auto tuning mode 1)
Automatic setting
_ _ _ 2: (Auto tuning mode 2)
_ _ _ 3 (Manual mode)
Manual setting
_ _ _ 4: (2 gain adjustment mode 2)
PB08
PG2
Position loop
gain
Set the gain of the position loop.
Set this parameter to increase the position response to level load disturbance.
Increasing the setting value will also increase the response level to the load
disturbance but will be liable to generate vibration and/or noise.
The setting of the parameter will be the automatic setting or manual setting
depending on the [Pr. PA08] setting. Refer to the following table for details.
Setting range: 1.0 to 2000.0
37.0
[rad/s]
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1
(interpolation mode))
Automatic setting
_ _ _ 1: (Auto tuning mode 1)
_ _ _ 2: (Auto tuning mode 2)
_ _ _ 3 (Manual mode)
Manual setting
_ _ _ 4: (2 gain adjustment mode 2)
Automatic setting
Summary of Contents for MR-J4
Page 9: ...A 8 MEMO ...
Page 19: ...10 MEMO ...
Page 73: ...1 FUNCTIONS AND CONFIGURATION 1 54 MEMO ...
Page 155: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 199: ...4 STARTUP 4 44 MEMO ...
Page 289: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 335: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 357: ...9 OUTLINE DRAWINGS 9 22 MEMO ...
Page 517: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 617: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 641: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 725: ...18 MR J4 03A6 SERVO AMPLIFIER 18 84 MEMO ...
Page 763: ...APPENDIX App 38 ...
Page 789: ...MEMO ...
Page 793: ......







































































