





























14. COMMUNICATION FUNCTION (MITSUBISHI GENERAL-PURPOSE AC SERVO PROTOCOL)
14 - 7
14.3.3 Error codes
Error codes are used in the following cases and an error code of single-code length is transmitted.
Receiving data from the master station, the slave station sends the error code corresponding to that data to
the master station. The error code sent in upper case indicates that the servo is normal and the one in lower
case indicates that an alarm occurred.
Error code
Error name
Explanation
Remark
Servo: normal
Servo: alarm
[A]
[a]
Normal
Data transmitted was processed normally. Positive
response
[B]
[b]
Parity error
Parity error occurred in the transmitted
data.
Negative
response
[C]
[c]
Checksum error
Checksum error occurred in the
transmitted data.
[D]
[d]
Character error
The transmitted character is out of
specifications.
[E]
[e]
Command error
The transmitted command is out of
specifications.
[F]
[f]
Data No. error
The transmitted data No. is out of
specifications.
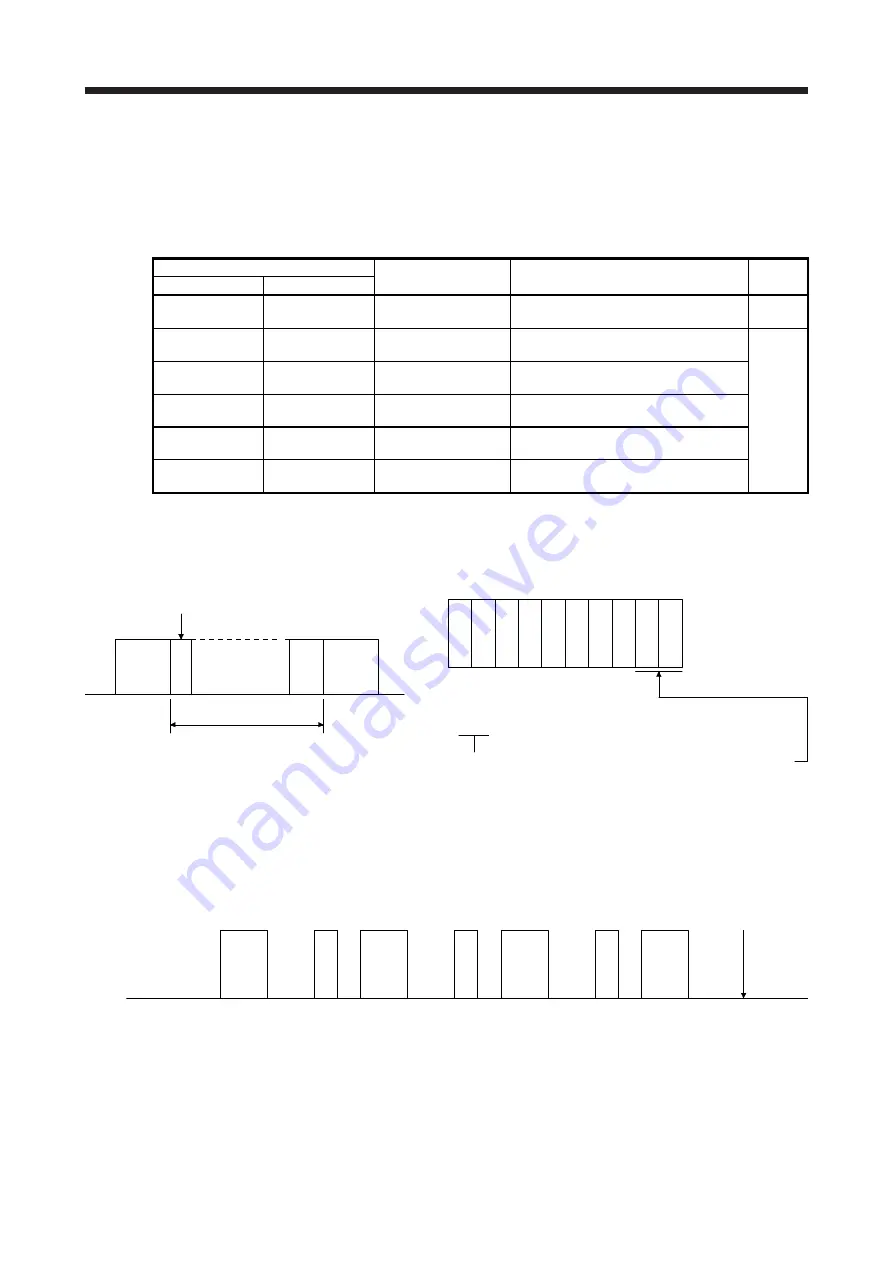
14.3.4 Checksum
The checksum is an ASCII-coded hexadecimal representing the lower two digits of the sum of ASCII-coded
hexadecimal numbers up to ETX, with the exception of the first control code (STX or SOH).
STX
or
SOH
ETX
Check
Checksum range
Station No.
[5]
[2]
STX
30H + 41H + 31H + 32H + 35H + 46H + 03H
= 152H
[0] [A] [1]
[F]
[5] [2]
ETX
02H 30H 41H 31H 32H 35H 46H 03H
Lower 2 digits 52 is sent after conversion into ASCII code [5] [2].
14.3.5 Time-out processing
The master station transmits EOT when the slave station does not start return processing (STX is not
received) 300 [ms] after the master station has ended communication processing. 100 ms after that, the
master station retransmits the message. Time-out occurs if the slave station does not answer after the
master station has performed the above communication processing three times. (communication error)
Message
300 ms
Controller side
(master station)
Servo side
(slave station)
EOT
100 ms
Message
300 ms
EOT
100 ms
Message
300 ms
EOT
100 ms
Message
300 ms
*Time-out
Summary of Contents for MR-J4
Page 9: ...A 8 MEMO ...
Page 19: ...10 MEMO ...
Page 73: ...1 FUNCTIONS AND CONFIGURATION 1 54 MEMO ...
Page 155: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 199: ...4 STARTUP 4 44 MEMO ...
Page 289: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 335: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 357: ...9 OUTLINE DRAWINGS 9 22 MEMO ...
Page 517: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 617: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 641: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 725: ...18 MR J4 03A6 SERVO AMPLIFIER 18 84 MEMO ...
Page 763: ...APPENDIX App 38 ...
Page 789: ...MEMO ...
Page 793: ......







































































