





























Goodrive600 series high-performance multifunction VFD
Function parameter list
-287-
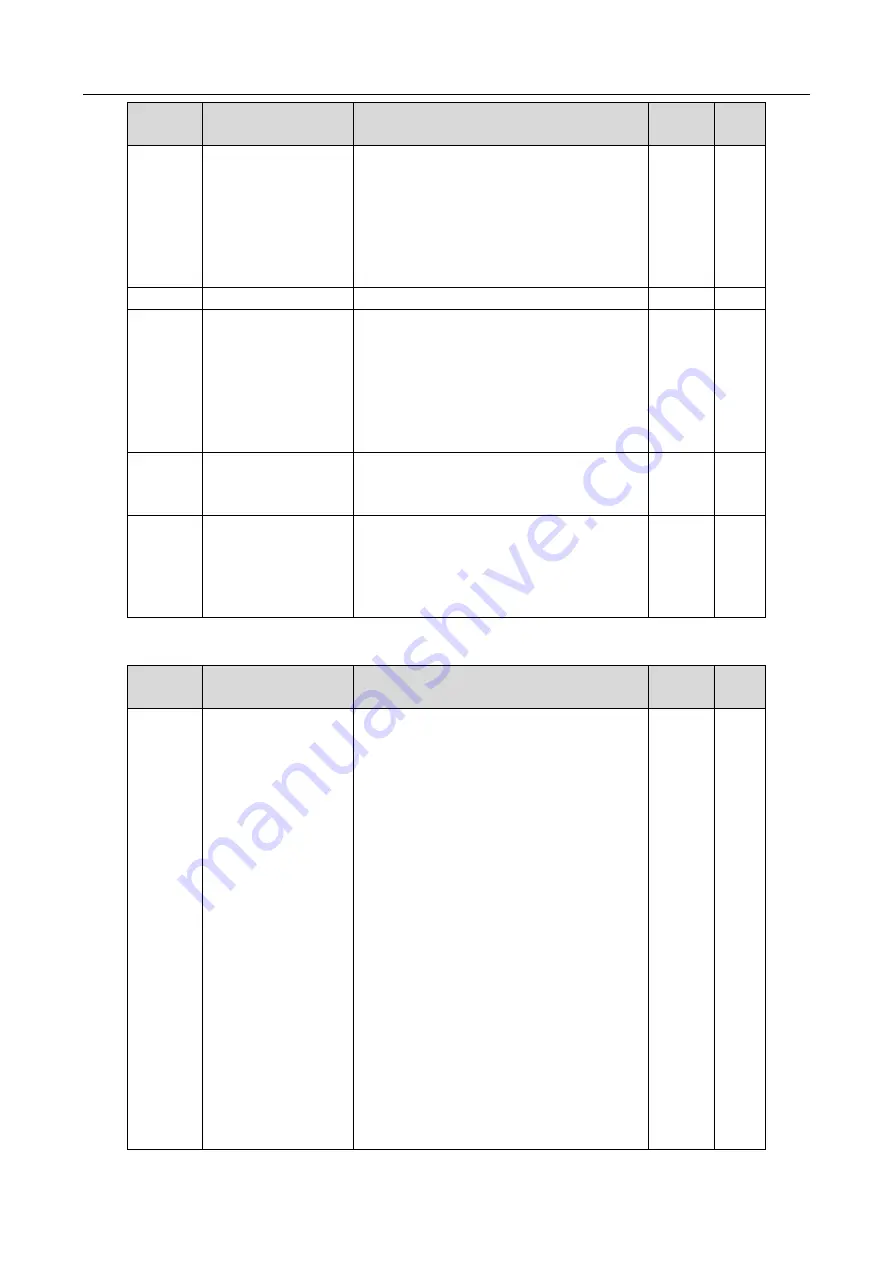
Function
code
Name
Description
Default Modify
Braking is performed immediately after the stop
command is given. The braking can be started
without waiting for magnetic flux weakening.
The cooling is better. The current of the stator
other than the rotor increases during magnetic
flux braking, while the cooling of the stator is
more effective than the rotor.
P08.51
Reserved
P08.52
STO lock selection
0: Lock upon STO alarm
Lock upon STO alarm indicates resetting is
required after state restoration if STO occurs.
1: No lock on STO alarm
No lock on STO alarm indicates STO alarm
disappears automatically after state restoration if
STO occurs.
0
○
P08.53
Upper limit frequency
bias value in torque
control
0.00 Hz
–P00.03 (Max. frequency)
0.00Hz
○
P08.54
Upper limit frequency
ACC/DEC selection in
torque control
0: No limit on acceleration or deceleration
1: ACC/DEC time 1
2: ACC/DEC time 2
3: ACC/DEC time 3
4: ACC/DEC time 4
0
○
P09 group
––PID control
Function
code
Name
Description
Default Modify
P09.00
PID reference source
When the frequency command selection
(P00.06, P00.07) is 7 or the voltage setting
channel selection (P04.27) is 6, the inverter unit
is process PID controlled.
The function code determines the target given
channel during the PID process.
0: Keypad (P09.01)
1: AI1
2: AI2
3: AI3
4: Reserved
5: Multi-step running
6: Modbus communication
7: CANopen communication
8: Ethernet communication
9: Reserved
10: EtherCAT/PROFINET communication
11: Programmable expansion card
12: PROFIBUS-DP/DeviceNet communication
The set target of process PID is a relative value,
for which 100% equals 100% of the feedback
0
○







































































