





























Goodrive600 series high-performance multifunction VFD
Function parameter list
-252-
Function
code
Name
Description
Default Modify
prevent overcurrent caused by DC braking at
high speed.
DC braking current for stop: It indicates the
applied DC braking energy. Stronger current
indicates greater DC braking effect.
DC braking time for stop: It indicates the hold
time of DC braking. If the time is 0, DC braking is
invalid, and the inverter unit decelerates to stop
within the specified time.
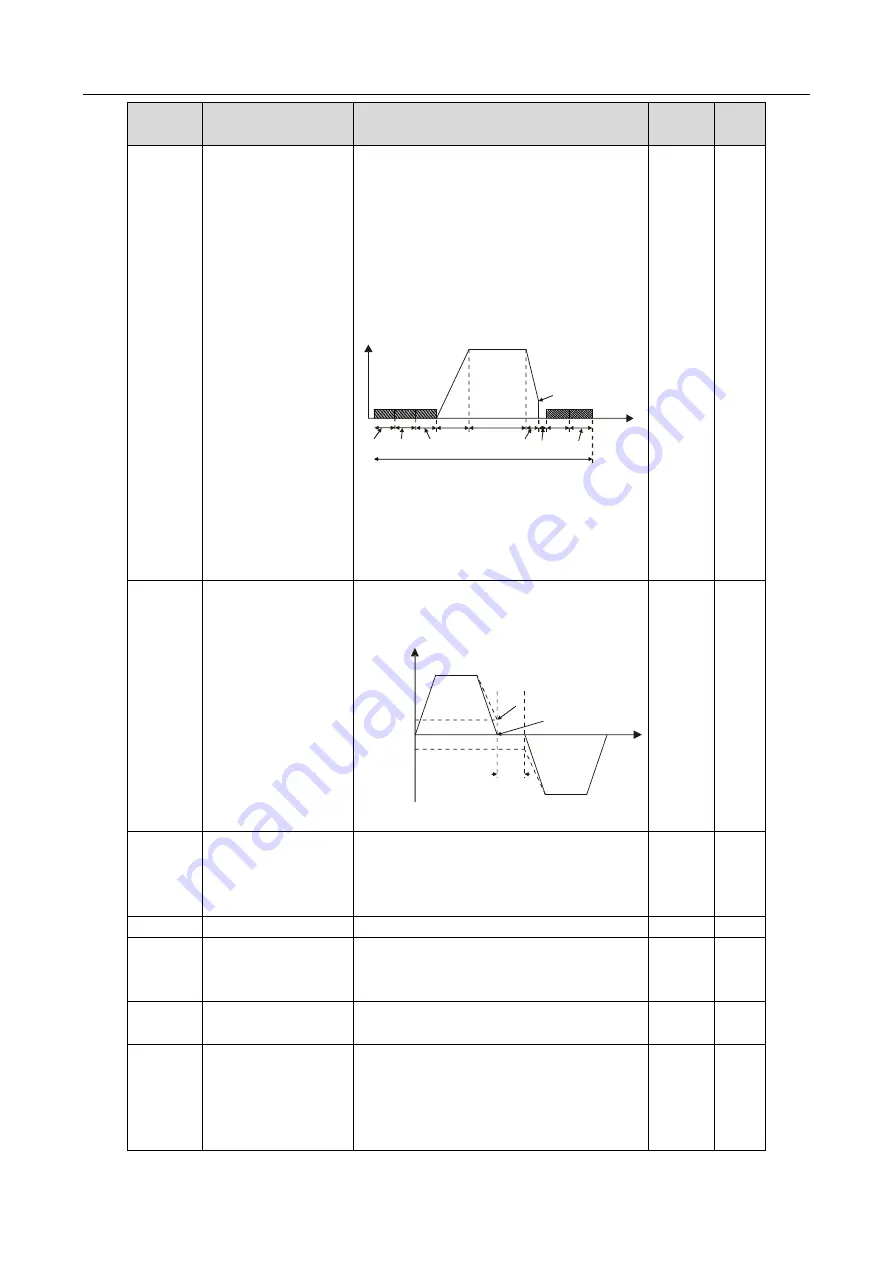
P01.04
ACC
process
P13.14
P01.23
Constant speed
Running
DEC
process
P01.10
P13.15
P01.12
P01.09
Time t
process
P01.09 setting range: 0.00Hz
–P00.03 (Max.
output frequency)
P01.10 setting range: 0.00
–30.00s
P01.11 setting range: 0.0
–100.0%
P01.12 setting range: 0.0
–50.0s
P01.13
FWD/REV running
deadzone time
Used to indicate the transition time specified in
P01.14 during FWD/REV rotation switching. See
the figure.
Output frequency f
Forward
Reverse
Deadzone
time
Time t
Start frequency
Switch over after the
zero frequency
Switch over after the
start frequency
Setting range: 0.0
–3600.0s
0.0s
○
P01.14
FWD/REV running
switching mode
0: Switch at zero frequency
1: Switch at the starting frequency
2: Switch after the speed reaches the stop speed
with a delay
1
◎
P01.15
Stop speed
0.00
–100.00Hz
0.50Hz
◎
P01.16
Stop speed detection
mode
0: Detect by the set speed (unique in space
voltage vector control mode)
1: Detect by the feedback speed
0
◎
P01.17
Stop speed detection
time
0.00
–100.00s
0.50s
◎
P01.18
Terminal-based running
command protection at
power-on
When the channel of running commands is
terminal control, the system detects the state of
the running terminal during power-on.
0: The terminal running command is invalid at
power-on. Even the running command is
0
○







































































