





























Program features
113
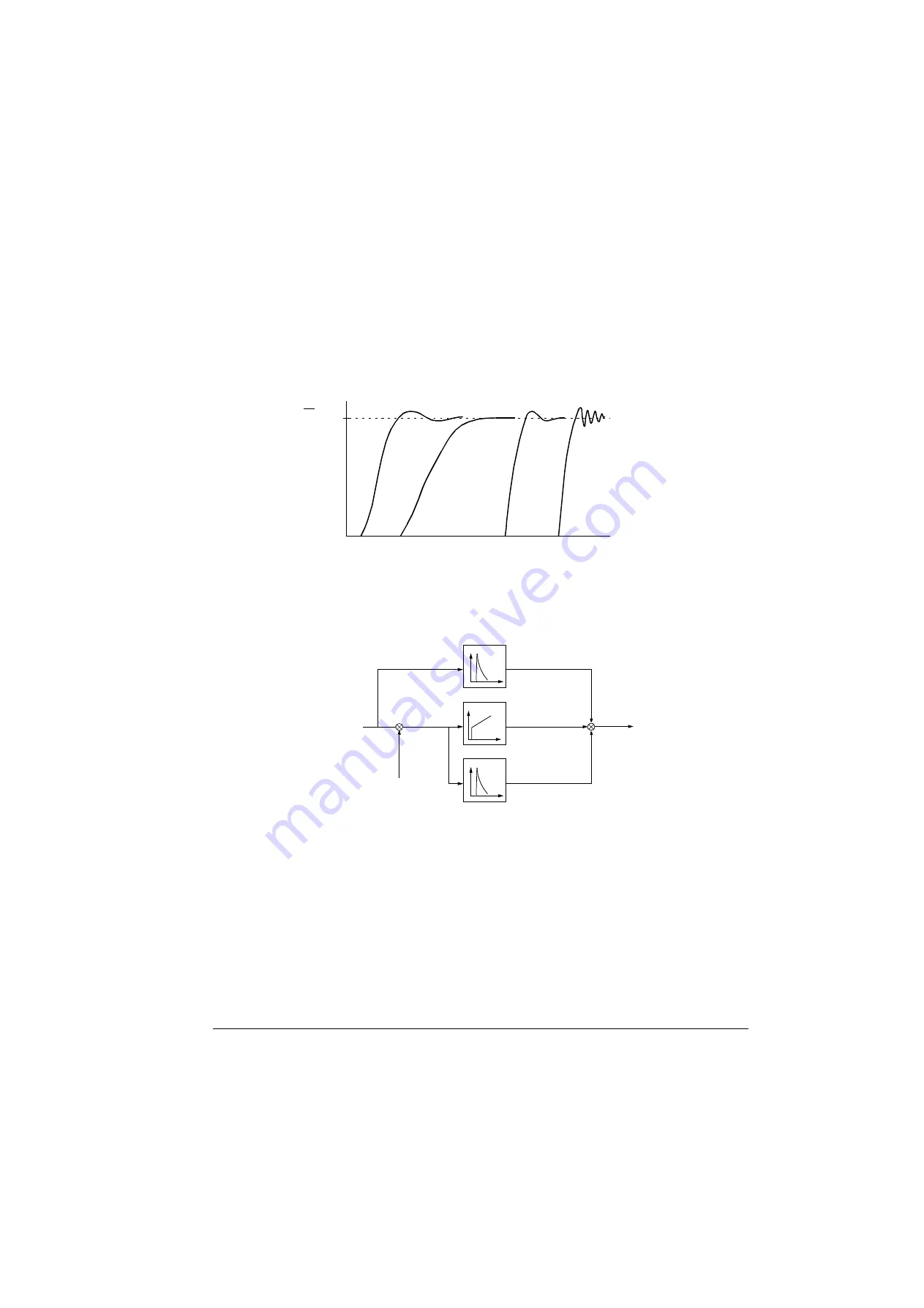
Speed controller tuning
It is possible to manually adjust the controller gain, integration time and derivation
time, or let the drive perform a separate speed controller Autotune Run (parameter
AUTOTUNE RUN). In Autotune Run, the speed controller is tuned based on
the load and inertia of the motor and the machine. The figure below shows speed
responses at a speed reference step (typically, 1 to 20%).
The figure below is a simplified block diagram of the speed controller. The controller
output is the reference for the torque controller.
Settings
and
Diagnostics
SPEED
A: Undercompensated
B: Normally tuned (autotuning)
C: Normally tuned (manually). Better dynamic performance than with B
D: Overcompensated speed controller
(%)
t
n
C
B
D
n
N
A
Derivative
Proportional,
integral
Derivative
acceleration
compensation
Torque
reference
Speed
reference
Calculated actual speed
Error
value
-
+
+
+
+
Summary of Contents for ACS350 Series
Page 1: ...ACS350 User s Manual ACS350 Drives 0 37 22 kW 0 5 30 HP ...
Page 4: ......
Page 8: ...Safety 8 ...
Page 18: ...Table of contents 18 ...
Page 24: ...Hardware description 24 ...
Page 44: ...Installation checklist 44 ...
Page 56: ...Start up control with I O and ID Run 56 ...
Page 140: ...Program features 140 ...
Page 242: ...Actual signals and parameters 242 ...
Page 266: ...Fieldbus control with embedded fieldbus 266 ...
Page 284: ...Fault tracing 284 ...
Page 288: ...Maintenance and hardware diagnostics 288 ...
Page 309: ...Dimensions 309 Frame size R2 IP20 NEMA 1 3AFE68586658 A Frame size R2 IP20 NEMA 1 VAR EMC ...
Page 311: ...Dimensions 311 Frame size R3 IP20 NEMA 1 3AFE68579872 B Frame size R3 IP20 NEMA 1 VAR EMC ...
Page 313: ......







































































