Actual signals and parameters
240
9905
MOTOR NOM VOLT
Defines the nominal motor voltage. Must be equal to the value on the motor
rating plate. The drive cannot supply the motor with a voltage greater than
the input power voltage.
WARNING!
Never connect a motor to a drive which is connected to power
line with voltage level higher than the rated motor voltage.
230 V (200 V
units)
400 V (400 V
units, Eur)
460 V (400 V
units, US)
115…345 V (200 V
units)
200…600 V (400 V
units, Eur)
230…690 V (400 V
units, US)
Voltage.
Note:
The stress on the motor insulations is always dependent on the drive
supply voltage. This also applies to the case where the motor voltage rating
is lower than the rating of the drive and the supply of the drive.
1 = 1 V
9906
MOTOR NOM CURR
Defines the nominal motor current. Must be equal to the value on the motor
rating plate.
I
2N
0.2…2.0 ·
I
2N
Current
1 = 0.1 A
9907
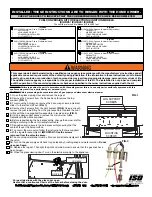
MOTOR NOM FREQ
Defines the nominal motor frequency, i.e the frequency at which the output
voltage equals the motor nominal voltage:
Field weakening point = Nom. frequency · Supply voltage / Mot nom. voltage
Eur: 50 /
US: 60
10.0…500.0 Hz
Frequency
1 = 0.1 Hz
9908
MOTOR NOM SPEED Defines the nominal motor speed. Must be equal to the value on the motor
rating plate.
Type
dependent
50…30000 rpm
Speed
1 = 1 rpm
9909
MOTOR NOM
POWER
Defines the nominal motor power. Must equal the value on the motor rating
plate.
P
N
0.2…3.0 ·
P
N
kW
Power
1 = 0.1 kW/hp
9910
ID RUN
This parameter controls a self-calibration process called the Motor ID Run.
During this process, the drive operates the motor and makes measurements
in order to identify motor characteristics and create a model used for internal
calculations.
OFF/
IDMAGN
OFF/IDMAGN
The Motor ID Run process is not run. Identification magnetization is
performed, depending on parameter
settings. In identification
magnetization, the motor model is calculated at first start by magnetizing the
motor for 10 to 15 s at zero speed (motor not rotating). The model is
recalculated always at start after motor parameter changes.
- Parameter
= 1 (VECTOR:SPEED) or 2 (VECTOR:TORQ):
Identification magnetization is performed.
= 3 (SCALAR:FREQ) and parameter
= 3 (SCALAR
FLYST) or 5 (FLY + BOOST): Identification magnetization is performed.
= 3 (SCALAR:FREQ) and parameter
has other value
than 3 (SCALAR FLYST) or 5 (FLY + BOOST): Identification magnetization
is not performed.
0
Parameters – complete descriptions
Index Name/Selection
Description
Def, FbEq
Output voltage
Output frequency
9907
9905
Summary of Contents for ACS350 Series
Page 1: ...ACS350 User s Manual ACS350 Drives 0 37 22 kW 0 5 30 HP ...
Page 4: ......
Page 8: ...Safety 8 ...
Page 18: ...Table of contents 18 ...
Page 24: ...Hardware description 24 ...
Page 44: ...Installation checklist 44 ...
Page 56: ...Start up control with I O and ID Run 56 ...
Page 140: ...Program features 140 ...
Page 242: ...Actual signals and parameters 242 ...
Page 266: ...Fieldbus control with embedded fieldbus 266 ...
Page 284: ...Fault tracing 284 ...
Page 288: ...Maintenance and hardware diagnostics 288 ...
Page 309: ...Dimensions 309 Frame size R2 IP20 NEMA 1 3AFE68586658 A Frame size R2 IP20 NEMA 1 VAR EMC ...
Page 311: ...Dimensions 311 Frame size R3 IP20 NEMA 1 3AFE68579872 B Frame size R3 IP20 NEMA 1 VAR EMC ...
Page 313: ......