



























14. USING A LINEAR SERVO MOTOR
14 - 26
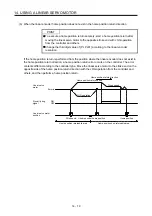
(a) Position deviation error detection
Set [Pr. PL04] to "_ _ _ 1" to enable the position deviation error detection.
[Pr. PL04]
Position deviation error detection enabled
1
When you compare the model feedback position ( 1)) and the feedback position ( 2)) in figure 14.1, if
the deviation is more than the value of [Pr. PL05 Position deviation error detection level] (1 mm to
1000 mm), [AL. 42.1 Servo control error by position deviation] will occur and the linear servo motor
will stop. The initial value of this detection level is 50 mm. Replace the set value as required.
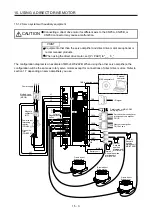
(b) Speed deviation error detection
Set [Pr. PL04] to "_ _ _ 2" to enable the speed deviation error detection.
[Pr. PL04]
Speed deviation error detection enabled
2
When you compare the model feedback speed ( 3)) and the feedback speed ( 4)) in figure 14.1, if
the deviation is more than the value of [Pr. PL06 Speed deviation error detection level] (1 mm/s to
5000 mm/s), [AL. 42.2 Servo control error by speed deviation] will occur and the linear servo motor
will stop. The initial value of this detection level is 1000 mm/s. Replace the set value as required.
(c) Thrust deviation error detection level
Set [Pr. PL04] to "_ _ _ 4" to enable the thrust deviation error detection.
[Pr. PL04]
Thrust deviation error detection enabled
4
When you compare the command thrust ( 5)) and the feedback thrust ( 6)) in figure 14.1, if the
deviation is more than the value of [Pr. PL07 Torque/thrust deviation error detection level] (1% to
1000%), [AL. 42.3 Servo control error by torque/thrust deviation] will occur and the linear servo
motor will stop. The initial value of this detection level is 100%. Replace the set value as required.
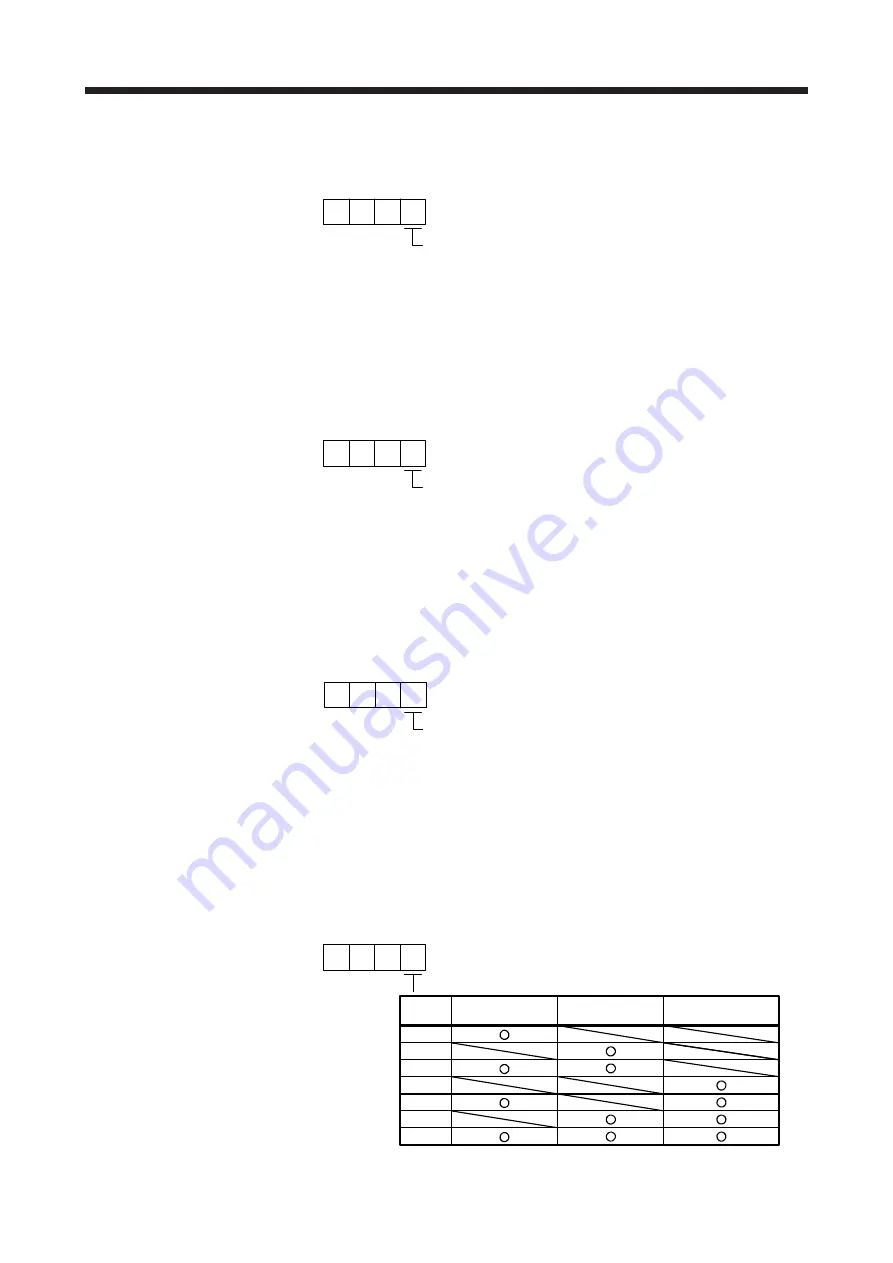
(d) Detecting multiple deviation errors
When setting [Pr. PL04] as shown below, multiple deviation errors can be detected. For the error
detection methods, refer to (1) (a), (b), (c) in this section.
[Pr. PL04]
Position deviation
error detection
Setting
value
Speed deviation
error detection
Thrust deviation
error detection
1
5
6
7
3
2
4
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...







































































