



























5. PARAMETERS
5 - 49
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
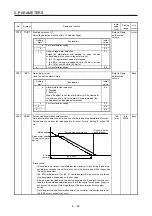
PE07
BC2
Fully closed loop control - Position deviation error detection level
Set [AL. 42.8 Fully closed loop control error by position deviation] of the fully closed
loop control error detection.
When the position deviation between the servo motor encoder and load-side encoder
becomes larger than the setting value, the alarm will occur.
This parameter is not available with MR-J4W2-0303B6 servo amplifiers.
100
[kpulse]
1 to
20000
Each
PE08
DUF
Fully closed loop dual feedback filter
Set a dual feedback filter band.
Refer to section 16.3.1 (6) for details.
This parameter is not available with MR-J4W2-0303B6 servo amplifiers.
[rad/s]
0 to
4500
Each
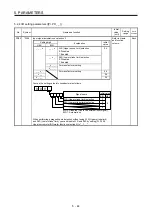
PE10
FCT3
Fully closed loop function selection 3
This parameter is not available with MR-J4W2-0303B6 servo amplifiers.
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ _ x
For manufacturer setting
0h
_ _ x _
Fully closed loop control - Position deviation error detection
level - Unit selection
0: 1 kpulse unit
1: 1 pulse unit
0h
_ x _ _
Droop pulse monitor selection for controller display
0: Servo motor encoder
1: Load-side encoder
2: Deviation between the servo motor and load side
0h
x _ _ _
Cumulative feedback pulses monitor selection for controller
display
0: Servo motor encoder
1: Load-side encoder
The setting of this digit is used for the fully closed loop
system and scale measurement function.
0h
PE34 **FBN2 Fully closed loop control - Feedback pulse electronic gear 2 - Numerator
Set a numerator of electronic gear for the servo motor encoder pulse at the fully
closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one
servo motor revolution is converted to the resolution of the load-side encoder.
Refer to section 16.3.1 (4) for details.
This parameter is not available with MR-J4W2-0303B6 servo amplifiers.
1
1 to
65535
Each
PE35 **FBD2 Fully closed loop control - Feedback pulse electronic gear 2 - Denominator
Set a denominator of electronic gear for the servo motor encoder pulse at the fully
closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one
servo motor revolution is converted to the resolution of the load-side encoder.
Refer to section 16.3.1 (4) for details.
This parameter is not available with MR-J4W2-0303B6 servo amplifiers.
1
1 to
65535
Each
PE41
EOP3
Function selection E-3
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ _ x
Robust filter selection
0: Disabled
1: Enabled
When you select "Enabled" of this digit, the machine
resonance suppression filter 5 set in [Pr. PB51] is not
available.
0h
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...







































































