




























14. USING A LINEAR SERVO MOTOR
14 - 17
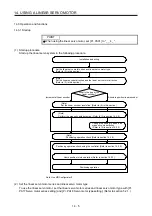
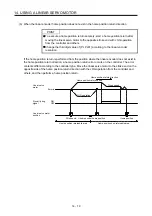
(a) When the linear encoder home position (reference mark) exists in the home position return direction
When an incremental linear encoder is used, the home position is the position per 1048576 pulses
(changeable with the third digit of [Pr. PL01]) with reference to the linear encoder home position
(reference mark) passed through first after a home position return start. Change the setting value of
[Pr. PL01] according to the linear encoder resolution.
[Pr. PL01]
Stop interval setting at the home position return
Setting
value
Stop interval [pulse]
0
8192
1
131072
2
262144
3
1048576 (initial value)
4
4194304
5
16777216
6
67108864
The following shows the relation between the stop interval at the home position return and the linear
encoder resolution. For example, when the linear encoder resolution is 0.001
μ
m and the parameter
for the stop interval at the home position return, [Pr. PL01], is set to "_ 5 _ _" (16777216 pulses), the
stop interval is 16.777 mm. The value inside a bold box indicates the recommended stop interval for
each linear encoder resolution.
[Unit: mm]
Pr. PL01
Linear encoder
resolution [µm]
0.001 0.005 0.01 0.02 0.05 0.1 0.2 0.5 1
2
Stop interval
[pulse]
_ 0 _ _
8192
0.008
0.041
0.082
0.164
0.410 0.819 1.638 4.096 8.192 16.384
_ 1 _ _
131072
0.131
0.655
1.311
2.621
6.554 13.107 26.214 65.536 131.072 262.144
_ 2 _ _
262144
0.262
1.311
2.621
5.243
13.107 26.214 52.429 131.072 262.144 524.288
_ 3 _ _
1048576
1.049
5.243
10.486
20.972
52.429 104.858 209.715 524.288 1048.576 2097.152
_ 4 _ _
4194304
4.194
20.972
41.943
83.886
209.715 419.430 838.861 2097.152 4194.304 8388.608
_ 5 _ _
16777216
16.777
83.886
167.772
335.544
838.861 1677.722 3355.443 8388.608 16777.216 33554.432
_ 6 _ _
67108864
67.109
335.544 671.089 1342.177 3355.443 6710.886 13421.773 33554.432 67108.864 134217.728
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...







































































