




























14. USING A LINEAR SERVO MOTOR
14 - 19
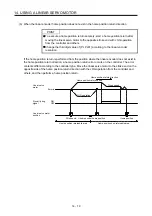
(b) When the linear encoder home position does not exist in the home position return direction
POINT
To execute a home position return securely, start a home position return after
moving the linear servo motor to the opposite stroke end with JOG operation
from the controller and others.
Change the third digit value of [Pr. PL01] according to the linear encoder
resolution.
If the home position return is performed from the position where the linear encoder does not exist in
the home position return direction, a home position return error occurs on the controller. The error
contents differ according to the controller type. Move the linear servo motor to the stroke end on the
opposite side of the home position return direction with the JOG operation from the controller and
others, and then perform a home position return.
Stroke end
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
JOG operation
Home position returnable area
Home position non-returnable area
0 mm/s
Linear encoder home position
Linear servo
motor
Proximity dog
signal
Linear servo motor
position
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...