




























8. TROUBLESHOOTING
8 - 14
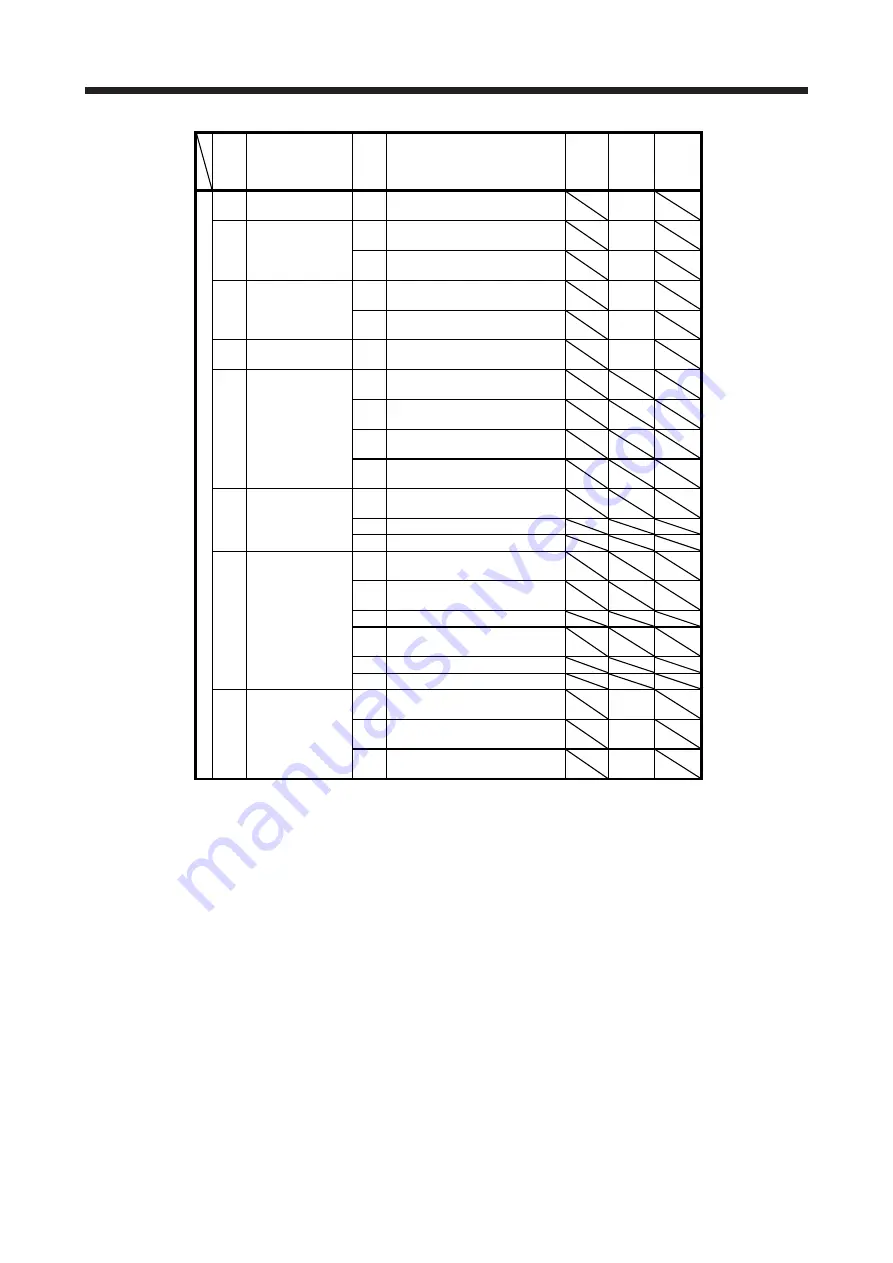
No.
Name
Detail
No.
Detail name
Stop
method
(Note 2,
3)
Process-
ing
system
(Note 5)
Stop
system
(Note 5)
Warning
ED
Output watt excess
warning
ED.1 Output watt excess warning
Each
axis
F0
Tough drive warning
F0.1
Instantaneous power failure tough
drive warning
Each
axis
F0.3 Vibration tough drive warning
Each
axis
F2
Drive recorder -
Miswriting warning
F2.1
Drive recorder - Area writing time-
out warning
Common
F2.2
Drive recorder - Data miswriting
warning
Common
F3
Oscillation detection
warning
F3.1 Oscillation detection warning
Each
axis
F4 Positioning
warning
F4.4
Target position setting range error
warning
F4.6
Acceleration time constant setting
range error warning
F4.7
Deceleration time constant setting
range error warning
F4.9
Home position return type error
warning
F5
Simple cam
function - Cam data
miswriting warning
F5.1
Cam data - Area writing time-out
warning
F5.2 Cam data - Area miswriting warning
F5.3 Cam data checksum error
F6.1
Cam axis one cycle current value
restoration failed
F6
Simple cam
function - Cam
control warning
F6.2
Cam axis feed current value
restoration failed
F6.3 Cam unregistered error
F6.4
Cam control data setting range
error
F6.5 Cam No. external error
F6.6 Cam control inactive
F7
Machine diagnosis
warning
F7.1 Vibration failure prediction warning
Each
axis
F7.2 Friction failure prediction warning
Each
axis
F7.3
Total travel distance failure
prediction warning
Each
axis
Note 1. After resolving the source of trouble, cool the equipment for approximately 30 minutes.
2. The following shows two stop methods of DB and SD.
DB: Stops with dynamic brake. (Coasts for the servo amplifier without dynamic brake.)
Coasts for MR-J4-03A6(-RJ) and MR-J4W2-0303B6.
SD: Forced stop deceleration
3. This is applicable when [Pr. PA04] is set to the initial value. The stop system of SD can be changed to DB
using [Pr. PA04].
4. For MR-J4-_A_ servo amplifier, quick stop or slow stop can be selected using [Pr. PD30].
5. The processing and stop systems are applicable only for the multi-axis servo amplifiers (MR-J4W_-_B_).
Refer to section 1.1 for details.
6.
As the initial value, it is applicable only for [AL. 24] and [AL. 32]. All-axis stop can be selected using [Pr.
PF02].
7. For MR-J4-_GF_ servo amplifier, quick stop or slow stop can be selected using [Pr. PD12]. (I/O mode
only)
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
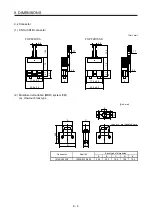
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...






































































