


























17. APPLICATION OF FUNCTIONS
17 - 47
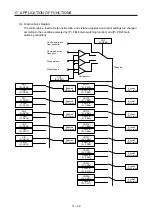
4) Vibration suppression control manual mode
POINT
When load-side vibration does not show up in servo motor-side vibration, the
setting of the servo motor-side vibration frequency does not produce an effect.
When the anti-resonance frequency and resonance frequency can be confirmed
using the machine analyzer or external equipment, do not set the same value
but set different values to improve the vibration suppression performance.
The setting range of [Pr. PB19], [Pr. PB20], [Pr. PX04], and [Pr. PX05] varies,
depending on the value in [Pr. PB07]. If a value out of the range is set, the
vibration suppression control will be disabled.
Measure work-side vibration and device shake with the machine analyzer or external measuring
instrument, and set the following parameters to adjust vibration suppression control manually.
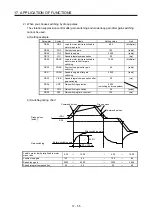
Setting item
Vibration suppression
control 1
Vibration suppression
control 2
Vibration suppression control - Vibration
frequency
[Pr. PB19]
[Pr. PX04]
Vibration suppression control - Resonance
frequency
[Pr. PB20]
[Pr. PX05]
Vibration suppression control - Vibration
frequency damping
[Pr. PB21]
[Pr. PX06]
Vibration suppression control - Resonance
frequency damping
[Pr. PB22]
[Pr. PX07]
Step 1. Select "Manual setting (_ _ _ 2)" of "Vibration suppression control 1 tuning mode
selection" in [Pr. PB02] or "Manual setting (_ _ 2 _)" of "Vibration suppression control 2
tuning mode selection" in [Pr. PX03].
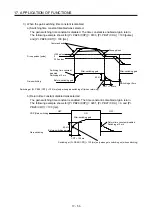
Step 2. Set "Vibration suppression control - Vibration frequency" and "Vibration suppression
control - Resonance frequency" as follows.
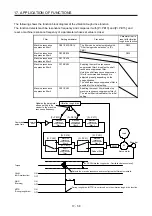
However, the value of [Pr. PB07 Model loop gain], vibration frequency, and resonance frequency
have the following usable range and recommended range.
Vibration suppression
control
Usable range
Recommended setting range
Vibration suppression
control 1
[Pr. PB19] > 1/2
π
× (0.9 × [Pr. PB07])
[Pr. PB20] > 1/2
π
× (0.9 × [Pr. PB07])
[Pr. PB19] > 1/2
π
× (1.5 × [Pr. PB07])
[Pr. PB20] > 1/2
π
× (1.5 × [Pr. PB07])
Vibration suppression
control 2
When [Pr. PB19] < [Pr. PX04],
[Pr. PX04] > (5.0 + 0.1 × [Pr. PB07])
[Pr. PX05] > (5.0 + 0.1 × [Pr. PB07])
1.1 < [Pr. PX04]/[Pr. PB19] < 5.5
[Pr. PB07] < 2
π
(0.3 × [Pr. PB19] + 1/8 × [Pr. PX04])
When [Pr. PB19] < [Pr. PX04],
[Pr. PX04], [Pr. PX05] > 6.25 Hz
1.1 < [Pr. PX04]/[Pr. PB19] < 4
[Pr. PB07] < 1/3 × (4 × [Pr. PB19] + 2 × [Pr. PX04])
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...







































































