



























16. FULLY CLOSED LOOP SYSTEM
16 - 7
16.3 Operation and functions
16.3.1 Startup
(1) Startup procedure
Start up the fully closed loop system in the following procedure.
Positioning operation check using the controller (Refer to section 16.3.3.)
Positioning operation check using MR Configurator2
Gain adjustment
Completion of installation and wiring
Positioning operation check using MR Configurator2
Adjustment and operation check in semi closed loop system
Gain adjustment
Adjustment and operation check in fully closed loop system
Selection of fully closed loop system (Refer to (2) in this section.)
Adjustment of dual feedback switching filter.
(for dual feedback control) (Refer to (6) in this section.)
Confirmation of load-side encoder position data (Refer to (5) in this section.)
Home position return operation (Refer to section 16.3.2.)
Positioning operation
Completion of fully closed loop system startup
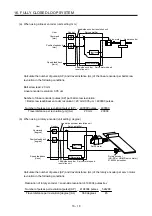
Setting of load-side encoder electronic gear (Refer to (4) in this section.)
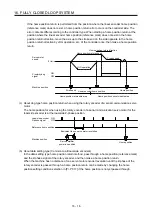
Setting of load-side encoder polarity (Refer to (3) in this section.)
Check that the servo
equipment is normal.
Do as necessary.
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...







































































