



























5. PARAMETERS
5 - 54
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
Each/
Common
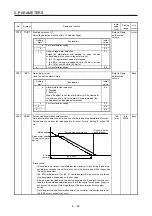
PL04
*LIT2
Linear servo motor/DD motor function selection 2
Select a detection function and detection controller reset condition of [AL. 42 Servo
control error].
Refer to Name
and function
column.
Each
Setting
digit
Explanation
Initial
value
_ _ _ x
[AL. 42 Servo control error] detection function selection
Refer to the following table.
3h
Setting
value
Torque/thrust
deviation
error (Note)
Speed
deviation
error (Note)
Position
deviation
error (Note)
0
Disabled
Disabled
1
Disabled
Enabled
2
Enabled
Disabled
3
Enabled
4
Disabled
Disabled
5
Enabled
Enabled
6
Enabled
Disabled
7
Enabled
Note. Refer to chapter 14 and 15 for details of each
deviation error.
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
[AL. 42 Servo control error] detection function controller
reset condition selection
0: Reset disabled (reset by powering off/on enabled)
1: Reset enabled
0h
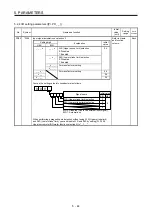
PL05
LB1
Position deviation error detection level
Set a position deviation error detection level of the servo control error detection.
When the deviation between a model feedback position and actual feedback position
is larger than the setting value, [AL. 42 Servo control error] will occur.
However, when "0" is set, the level vary depending on the operation mode in [Pr.
PA01].
Linear servo motor: 50 mm
Direct drive motor: 0.09 rev
0
[mm]/
[0.01 rev]
0 to
1000
Each
PL06
LB2
Speed deviation error detection level
Set a speed deviation error detection level of the servo control error detection.
When the deviation between a model feedback speed and actual feedback speed is
larger than the setting value, [AL. 42 Servo control error] will occur.
However, when "0" is set, the level vary depending on the operation mode in [Pr.
PA01].
Linear servo motor: 1000 mm/s
Direct drive motor: 100 r/min
0
[mm/s]/
[r/min]
0 to
5000
Each
PL07
LB3
Torque/thrust deviation error detection level
Set a torque/thrust deviation error detection level of the servo control error detection.
When the deviation between a current command and current feedback is larger than
the setting value, [AL. 42.3 Servo control error by torque/thrust deviation] will occur.
100
[%]
0 to
1000
Each
Содержание MR-J4W2-0303B6
Страница 17: ...8 App 16 Status of general purpose AC servo products for compliance with the China RoHS directive App 58 ...
Страница 39: ...2 INSTALLATION 2 8 MEMO ...
Страница 97: ...4 STARTUP 4 20 MEMO ...
Страница 181: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 235: ...9 DIMENSIONS 9 6 MEMO ...
Страница 245: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 309: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 365: ...15 USING A DIRECT DRIVE MOTOR 15 24 MEMO ...
Страница 389: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 461: ...17 APPLICATION OF FUNCTIONS 17 72 MEMO ...
Страница 556: ...APPENDIX App 41 ...
Страница 585: ...MEMO ...






































































