





























Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
505
8
Basic drive functions (MCK)
8.2
Internal interfaces | System block "LS_MotionControlKernel"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.2.1
MCK control word
The motion control function implemented in the
system block can be
controlled via the
wMotionCtrl1
and
wMotionCtrl2
control words. Together, both control words
form a 32-bit control double word which serves to control the entire MotionControlKernel. All
motion profiles in the various operating modes can be operated via this interface.
For direct control via a fieldbus system, the two control words can be triggered by the field bus via
a port block. In addition to a few other signals (e.g. limit switch, speed override) that are connected
to the digital inputs of the inverter, all control signals can therefore be activated/deactivated via the
fieldbus used (CAN, PROFIBUS, etc.).
As an alternative to this, changes to the individual control bits or bit fields (e.g. for specifying the
profile number) can also be carried out via separate process inputs provided by the
function block. The control words
wOutMckPosCtrl_1
and
wOutMckPosCtrl_2
output by this function block constitute the input information for the
system block in this case.
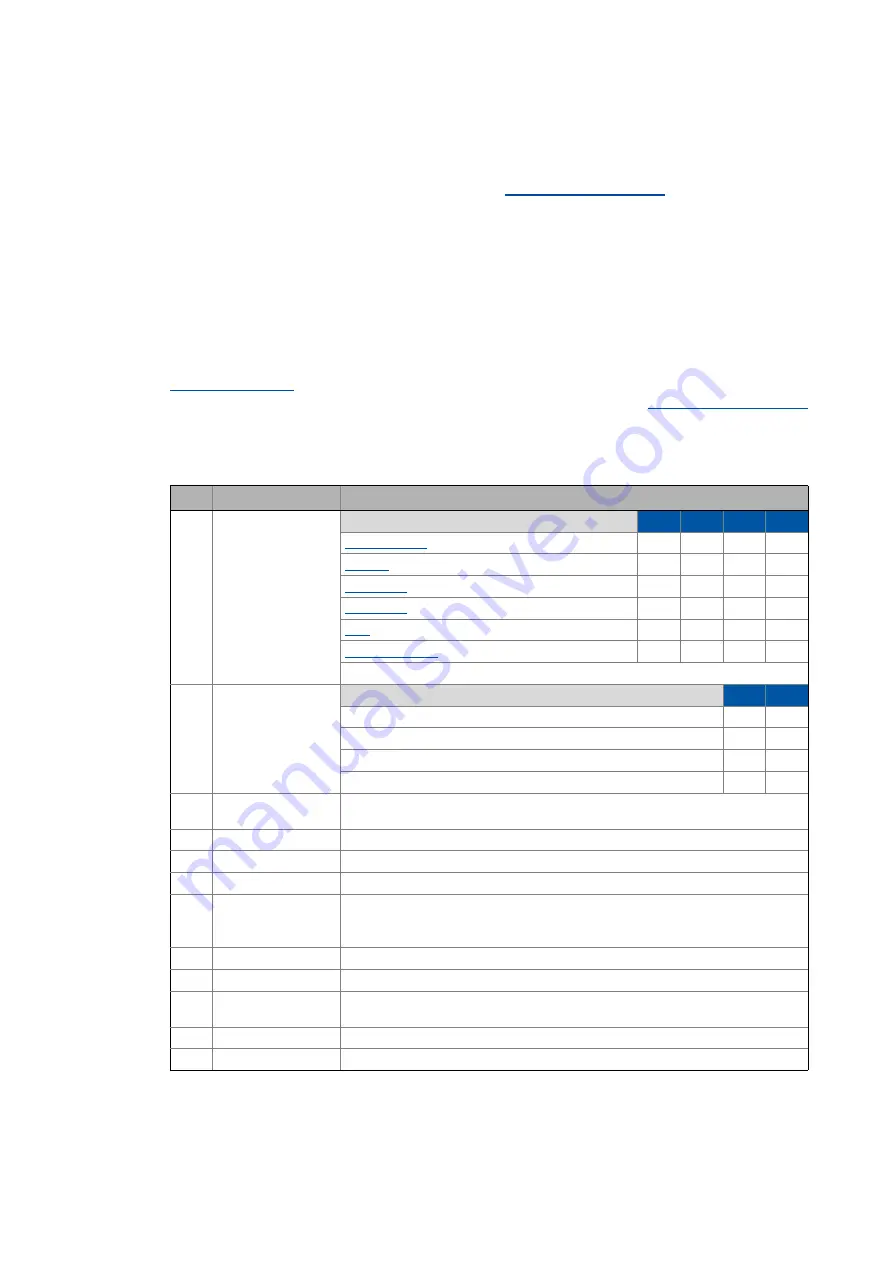
MCK control word 1 (wMotionCtrl1)
Bit
Designation
Description
0
...
3
OpMode_Bit0
...
OpMode_Bit3
Operating mode
Bit 3
Bit 2
Bit 1
Bit 0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
1
1
0
1
0
0
0
1
0
1
All other possible settings are reserved for future extensions!
4
5
ManJogPos
ManJogNeg
Manual jog
Bit 5
Bit 4
Stop manual jog
0
0
Manual jog CW
0
1
Manual jog in counter-clockwise direction
1
0
No change from previous status
1
1
6 ManExecute
2ndSpeed
"1"
≡
Change over to manual speed 2
7 ReleaseLimitSwitch
"1"
≡
Retract operated hardware limit switch
8 HomStartStop
"1"
≡
Start/stop homing process
9 HomSetPos
"1"
≡
Set homing position
10 HomResetPos
"1"
≡
Reset the "Reference known" status
•
bHomingePosDone
and
bHomePosAvailable
are reset to FALSE.
• The positions remain unaffected.
11 EnableSpeedOverride "1"
≡
Activate speed override
12 EnableAccOverride
"1"
≡
Activate acceleration override
13 Enable
SRampOverride
"1"
≡
Activate S-ramp override
14 PosTeachSetPos
"1"
≡
Teach MCK set position into the selected profile
15 PosTeachActPos
"1"
≡
Teach current position into the selected profile