





























Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
1147
15
Parameter reference
15.2
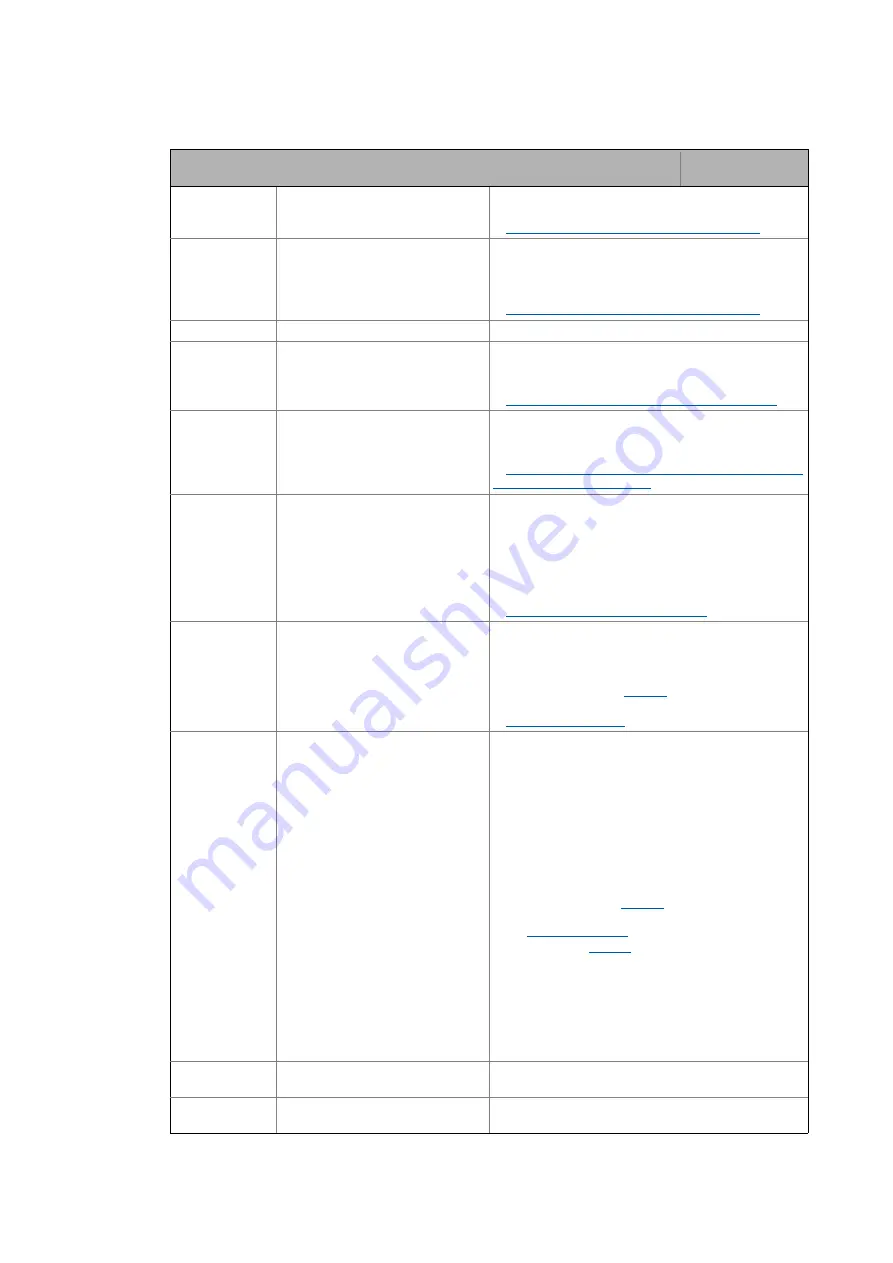
Parameter list
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Bit 1 No switch-off of the brake chopper
after 4s
1
≡
Limitation of the operating time of the brake chopper
(brake transistor) is deactivated.
Braking operation/brake energy management
Bit 2 Brake chopper off in case of trip
0
≡
No response of the brake chopper in the "Fault"
device status.
1
≡
In the "Fault" device status, the brake chopper is
permanently switched off without any delay.
Braking operation/brake energy management
Bit 3 Reserved (do not change!)
Bit 4 Motor ident: Switching frequency
8kHz
Switching frequency for motor parameter identification:
0
≡
4 kHz
1
≡
8 kHz
Preventing a decrease of the switching frequency
Bit 5 Field/field weakening control in
500us
Cycle time for field weakening control:
0
≡
1 ms
1
≡
500
μ
s
Optimising the behaviour of the asynchronous motor
Bit 6 Motor ident.: No calculation C577
C578 C2864
From version 15.00.00
: Following successful motor
parameter identification, the field weakening controller
parameters for ASM servo control are calculated as well.
If these parameters are not to be calculated, bit 6 must
be set to "1".
0
≡
Calculate parameter
1
≡
Do not calculate parameter
Automatic motor data identification
Bit 7 If C2879 Bit1=0: C087 is warm
From version 15.00.00
, the too high slip with the
activated option "Slip calculation from motor nameplate
data" can be corrected for the ASM servo control by
setting bit 7 to "1".
1
≡
Rated motor speed (
) is assumed for a warm
machine.
Bit 8 Suppress V/f emergency operation
From version 15.00.00
, it is internally switched to the
encoderless V/f characteristic control in case of a motor
control type with feedback and an encoder open circuit
in order to avoid impermissible motor movements.
• In order that this "V/f emergency operation" works
properly, the parameters relevant for the V/f
characteristic control (base frequency, Vmin boost,
slip compensation, etc.) have to be set correctly. As an
alternative, a motor parameter identification can be
executed as well.
• The change-over to "V/f emergency operation" is
and via the
bWirebreakUfLinearActive
status signal at the
SB
• The setting in
is not affected by the change-
over.
The "V/f emergency operation" can be suppressed by
setting bit 8 to "1".
0
≡
V/f emergency operation in case of encoder open
circuit
1
≡
No V/f emergency operation in case of encoder open
circuit
Bit 9 Optimisation of field weakening
control
Bit 10 V/f+encoder without adaptation of
voltage
Parameter | Name:
C02864 | MCTRL: Optimisiations
Data type: UNSIGNED_16
Index: 21711
d
= 54CF
h