





























PARAMETER REFERENCE TABLES
Parameter Descriptions > SET Menu
202
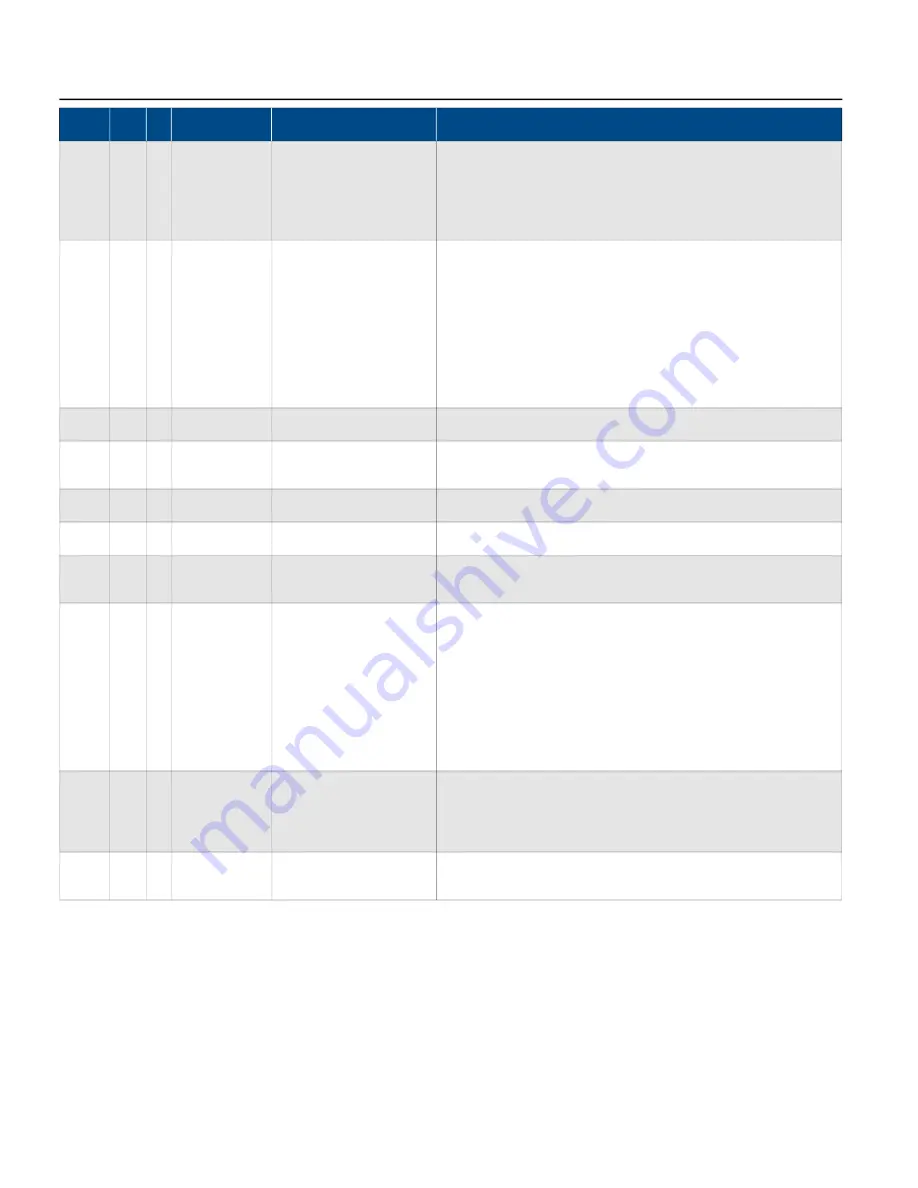
SET-09 0009 N Hand Speed Ref 0_Keypad
1_RS485 Serial
2_AVI1 Analog
3_ACI Analog
4_AVI2 Analog
5_Com Card
Source of speed reference when in Hand mode.
0_Keypad input.
1_RS-485 Interface
2, 3, 4_Analog input from BMS, PLC, Potentiometer or other control device.
5_Communications card control.
When in Hand mode, PID is disabled.
SET-10 0010 N Hand Run Cmd
0_Keypad
1_Digital Input
2_RS485 Serial
3_Com Card
4_Ext HOA in Hand
Source of Run Command in Hand mode.
0_Keypad: Run command from Start/Stop button.
1_Digital Input: Run command from digital input
[IO-21]
to
[IO-28]
set to
38_FWD
or
39_REV
. If direction is set here, then dedicated FWD input is dis
-
abled. Keypad STOP is disabled.
2_RS485 Serial: Run command from RS485 interface. Keypad STOP is dis
-
abled.
3_Com Card: Run command from communications card. This does not
include CANopen card.
4_Ext HOA in Hand: Run command from digital input
[IO-21~28]
set to
26_HOA
HAND
(when HOA is in Hand position).
SET-11
0011 Y Accel Time
0 to 6000.0 sec
Time in seconds for the drive to accelerate from 0 Hz to maximum fre
-
quency. Default depends on
Application [SET-00]
and VFD HP rating.
SET-12
0012 Y Decel Time
0 to 6000.0 sec
When Stop Mode is set to Decelerate, time in seconds to slow down from
maximum frequency to 0 Hz. Default depends on
Application [SET-00]
and VFD
HP rating.
SET-13
0013 Y Low Freq Limit
0.0 to
[SET-14]
(Hz)
The lowest frequency (speed) allowable. If speed control falls below setting,
motor will continue to run at this limit.
SET-14 0014 N High Freq Limit
[SET-13]
to
[VFD-00]
(Hz)
The highest frequency (speed) allowable. If speed control signal goes
higher, motor will continue to run at this limit.
SET-15
0015 N Load Rotation
0_FWD & REV
1_FWD Only
2_REV Only
Allows the motor to run in the forward and reverse direction. Setting it to a
specific direction can prevent injury or damage to equipment.
SET-16 0016 N Stop Mode
0_Decel to stop
1_Coast to stop
2_DC Brake
Determines how the motor is stopped when a STOP command is initiated.
0_Decel to stop: VFD decelerates frequency to zero frequency and then
stops.
1_Coast to stop: VFD stops producing output instantly and motor spins
down freely until it stops.
2_DC Brake: The VFD will inject DC current to the motor windings during
deceleration after a stop command is received and the output frequency is
below VFD-40 setting. DC injection brake provides a faster stop for the
motor, but it generates heat in the motor winding and depending on set
-
tings in parameters
[VFD-37~39]
and braking duty cycle the motor can be
overheated.
SET-17
0017 N PID Mode
0_Disable
1_PID Direct
2_PID Inverse
PID control allows the VFD to maintain a process value (pressure, tempera
-
ture etc.) by varying the output frequency based on the difference between
a set point and actual feedback value.
1_Direct: Output decreases if feedback becomes greater than a set-point.
2_Inverted: Output increases if feedback becomes greater than a set-point.
SET-18 0018 N PID F/B Source
0_ACI
1_AVI1
2_AVI2
Selects an analog input terminal for PID Feedback source.
CODE Mod
Bus AR Display Name
Range
Description
Summary of Contents for CERUS X-DRIVE CXD-003A-4V
Page 2: ......
Page 3: ...CERUS X DRIVE INSTALLATION AND OPERATION MANUAL Firmware Version 1 2 Franklin Electric Co Inc ...
Page 96: ...OPERATION Protection Features 96 ...
Page 112: ...ADVANCED APPLICATION OPTIONS Multi Drive Configurations 112 ...
Page 124: ...COMMUNICATIONS BACnet Communication 124 ...
Page 128: ...ACCESSORIES Optional Extension Cards 128 Frame D Frame E Frame F ...
Page 129: ...ACCESSORIES Optional Extension Cards 129 Frame G Frame H ...
Page 132: ...ACCESSORIES Optional Extension Cards 132 ...
Page 234: ...PARAMETER REFERENCE TABLES Parameter Descriptions Motor Menu 234 ...
Page 250: ...GLOSSARY 250 ...







































































