





























B
asi
s
Chapter 6 Built-in PID Function
6-15
(o) Differential Filter Value Setting
It sets the coefficient of differential filter. Since differential control outputs in proportion to gradient of error and gradient of PV
change, it may suddenly change MV as it generates a large response to instantaneous noise or disturbance. To prevent it,
XGB series uses a value to which PV is filtered mathematically for differential control. Differential filter value is the coefficient to
determine the filter degree for differential control. As smaller differential value set, as stronger differential operation is. The
available scope is between 0 ~ 65,535 and if it is set as 0, the differential filter does not work.
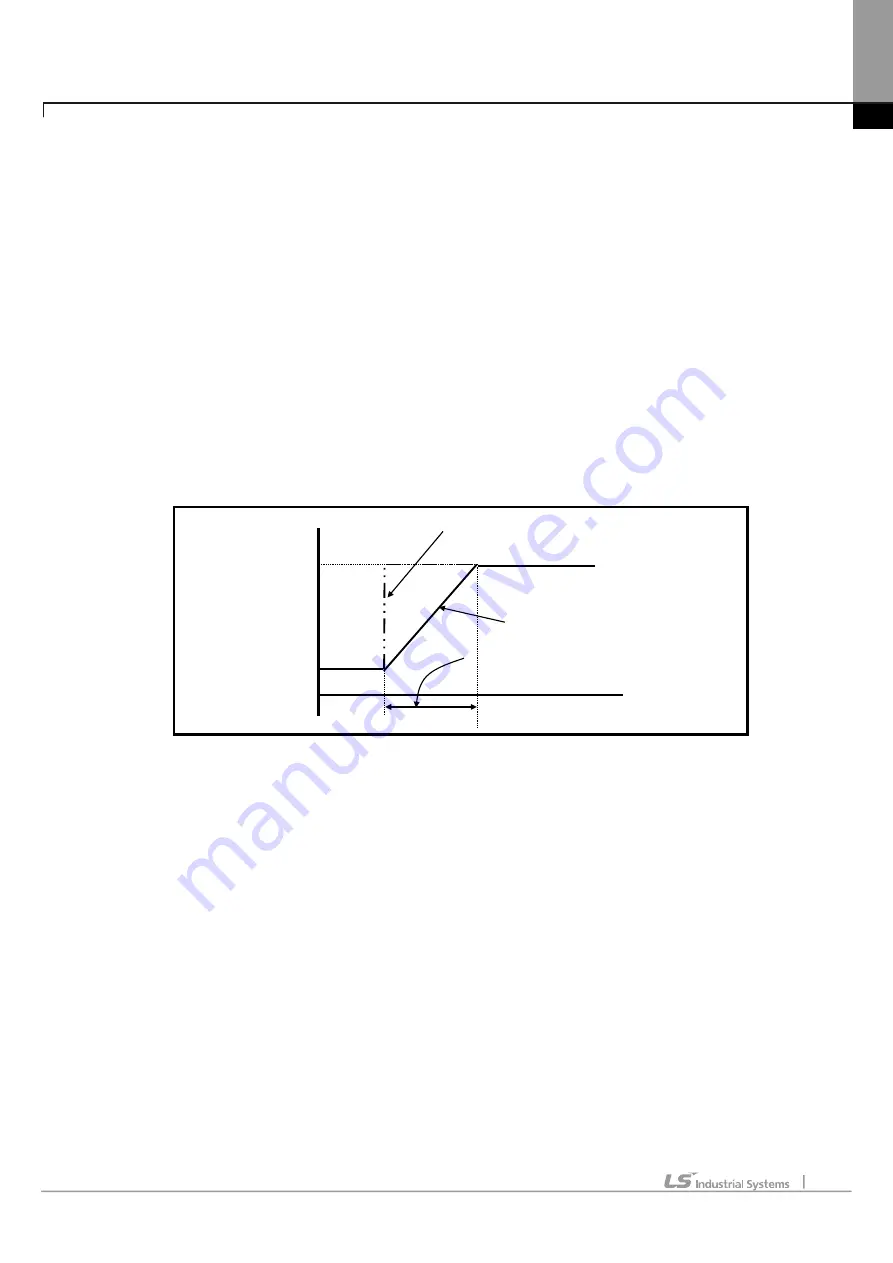
(p) Setting set value ramp
Since the drift is suddenly large if SV is heavily changed during PID control, MV is also changed heavily to correct it. Such an
operation may cause excessive operation of a system to control and a drive. To prevent it, SV ramp is used, changing SV
gradually step by step when modifying SV during operation. If using the function, SV is gradually changed by SV ramp when
SV is changed during PID control. At the moment, SV ramp setting represents the frequency of PID operation cycle taken
from when SV starts changing to when it reaches to the final SV. For instance, if SV is to be changed from 1000 to 2000
during operation as PID operation cycle is 10ms and its SV ramp is 500, SV may reach to 2000 after 500X10ms = 5 seconds,
that is, as it increases each 2 per operation cycle and after the 500th operation scans. The available scope of setting is
between 0 ~65,535 and it is set as 0, it does not work.
[ Figure 6.12 SV Ramp function ]
(q) PV Follow-up setting
It is intended to prevent any excessive operation of a drive resulting from sudden change of output at the initial control and
changes SV gradually from PV at the time when PID operation starts, not directly to SV in case control just turns from stop to
operation mode or it changes from manual to automatic operation. At the moment, SV represents the frequency of PID
operation cycles taken from when control starts to when it reaches to the set SV (other operations are same as SV ramp
function). The available scope is between 0 ~ 65,535. If SV is changed again while PV follow-up is in operation, the SV would
be also changed according to SV ramp.
(r) Min./max. PV
It sets the min./max. value entered as the present value of PID control. The available scope is between -32,768 ~ 32,767.
T
i
Existin
SV
Modifie
d SV
If SV Ramp is not used
If SV Ramp is used
SV * operation
cycle
Содержание XBE-DC08A
Страница 124: ...Main Chapter 1 Configuration and Operation Mode of Programs 1 27 1 Memory block diagram ...
Страница 155: ...Main Chapter 2 CPU Function 2 29 Notice For more details on the monitor refer to the XG5000 manual ...
Страница 504: ...Position Chap 6 Commands 6 61 6 11 Function blocks related to Servo Drive ...
Страница 512: ...Positioning Chapter 7 Program 7 8 manual operation 7 1 4 Parameter and Operation Data Setting 1 Parameter Setting ...
Страница 644: ...Positioning Chapter 8 Functions 8 91 ...
Страница 727: ...Positioning Chapter 9 Positioning Error Information Solutions 9 13 ...
Страница 861: ...Special Chapter 1 Embedded Analog 1 39 5 Select View Variables Comments Variables and comments are both displayed ...
Страница 1206: ...Appendix 2 Dimension App2 1 Appendix 2 Dimension Unit mm 1 CPU Type XEC DN32U 2 Positioning Type XEC DN32UP ...
Страница 1207: ...Appendix 2 Dimension App2 2 2 Analog Type XEC DN32UA ...
Страница 1209: ...Appendix 2 Dimension App2 4 XBE DC08A XBE DC16A XBE TN08A XBE TN16A XBE DR16A XBE RY08A ...
Страница 1210: ...Appendix 2 Dimension App2 5 4 Extension Cnet I F Module XBL C41A XBL C21A ...