





























6
Device Control
158
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English
The remaining bits of the controlwords are explained in the following. Some bits have different signific
ance, depending on the operating mode (modes_of_operation), i.e. whether the motor controller is
speed- or torque-controlled, for example:
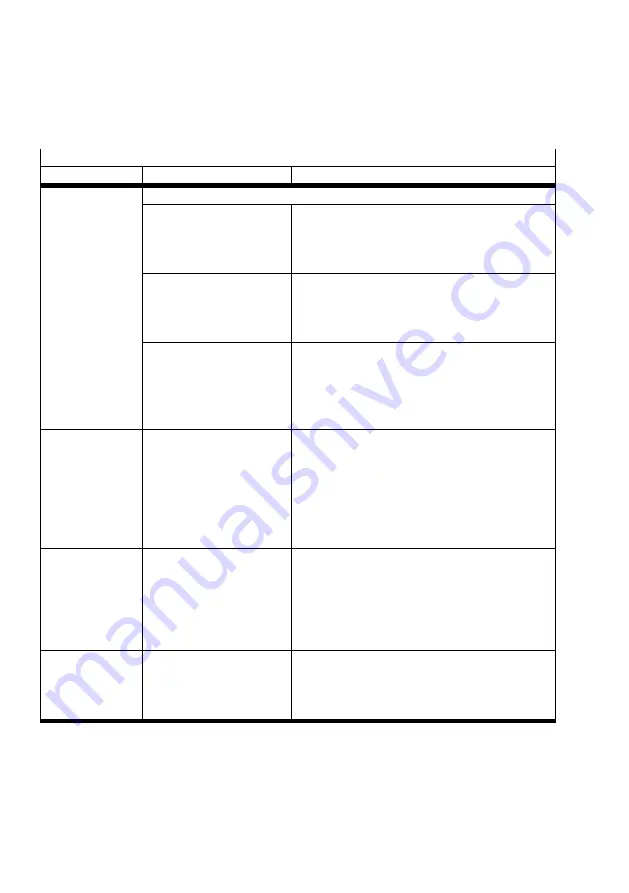
controlword
Bit
Function
Description
4
Dependent on modes_of_operation
new_set_point
In the Profile Position Mode:
A rising edge signals to the motor controller that a
new positioning task should be undertaken.
for
this, see unconditionally chapter 7.3.
start_homing_operation
In the Homing Mode:
A rising edge causes the parametrised reference
travel to start. A falling edge interrupts a running
reference travel prematurely.
enable_ip_mode
In the Interpolated Position Mode:
This bit must be set when the interpolation data
records are supposed to be evaluated. It is ac
knowledged through the bit ip_mode_active in the
statusword.
unconditionally also chapter 7.4.
5
change_set_immediately
Only in the Profile Position Mode:
If this bit is not set, any positioning tasks currently
running will be worked off before any new one is
begun. If the bit is set, an ongoing positioning is
interrupted immediately and replaced by the new
positioning task.
for this, see unconditionally
6
relative
Only in the Profile Position Mode:
If the bit is set, the motor controller obtains the
target position (target_position) of the current
positioning task relative to the setpoint position
(position_demand_value) of the position control
ler.
7
reset_fault
In the transition from zero to one, the motor con
troller tries to acknowledge the existing errors.
This is only successful if the cause of the error has
been resolved.





















































