





























7
Operating modes
180
Festo – GDCP-CMMP-M3/-M0-C-CO-EN – 1510b – English
7.2.3
Reference Travel Processes
The various reference travel methods are depicted in the following illustrations.
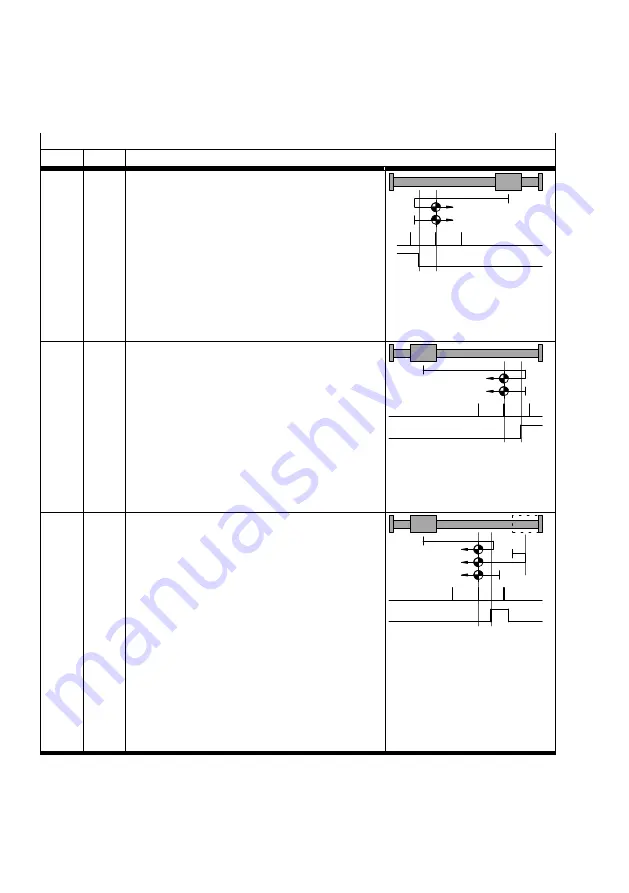
Homing methods
hex
dec
Description
01h
1
Negative limit switch with index pulse
1)
1. If negative limit switch inactive:
Run at search velocity in negative direction to
the negative limit switch.
2. Travel at crawling velocity in positive direction
until the limit switch becomes inactive, then
continue to the first index pulse. This position
is taken as the homing point.
3. If this is parameterised: travel at positioning
velocity to the axis zero point.
Index pulse
Negative limit switch
02h
2
Positive limit switch with index pulse
1)
1. If positive limit switch inactive:
Run at search velocity in positive direction to
the positive limit switch.
2. Travel at crawling velocity in negative direction
until the limit switch becomes inactive, then
continue to the first index pulse. This position
is taken as the homing point.
3. If this is parameterised: travel at positioning
velocity to the axis zero point.
Index pulse
Positive limit switch
07h
7
Reference switch in positive direction with index
pulse
1)
1. If reference switch inactive:
Travel at search velocity in positive direction
to the reference switch.
If the stop or limit switch is approached:
Travel at search velocity in positive direction
to the reference switch.
2. Travel at crawling velocity in negative direction
until the reference switch becomes inactive,
then continue to the first index pulse. This po
sition is taken as the homing point.
3. If this is parameterised: travel at positioning
velocity to the axis zero point.
Index pulse
Reference
switch
Only possible for motors with encoder/resolver with index pulse.
Limit switches are ignored during travel to the stop.
Since the axis is not to remain at the stop, the travel to the axis zero point must be parameterised and the axis zero point offset
must be ≠ 0.





















































