





























4-
129
4
Operation
11. “MANUAL” mode
11.8.3
Return-to-origin procedure
This section explains how to perform return-to-origin on all axes specified by the controller.
The robot must be at servo-on to perform return-to-origin on incremental mode axes
using the stroke end detection method or sensor method for return-to-origin. Likewise,
the robot must be at servo-on to perform an absolute search on semi-absolute mode axes.
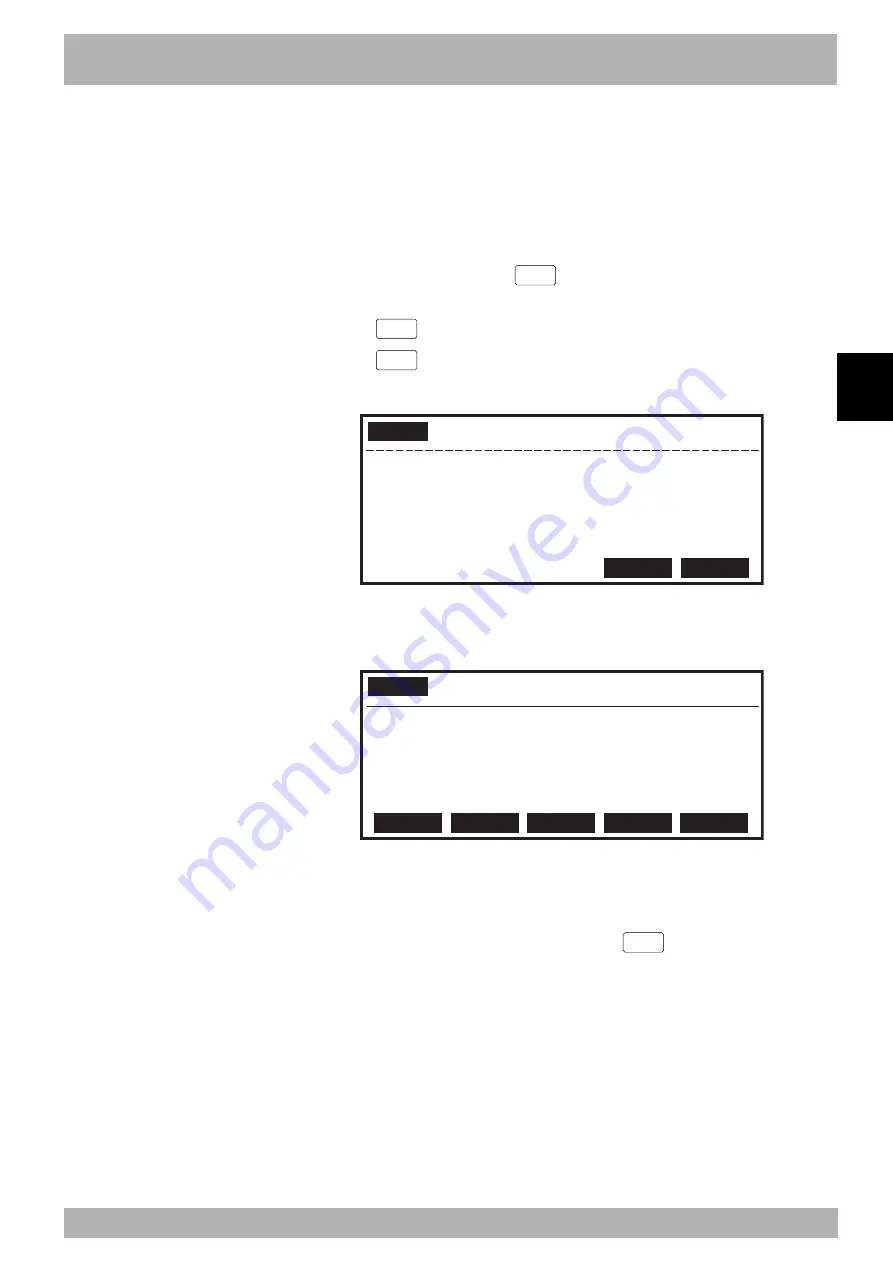
[Procedure]
1) In "MANUAL" mode, press the
F 3
(ORIGIN) key.
A confirmation message appears on the guide line in the programming box screen.
Press the
F 4
(YES) key to perform return-to-origin.
Press the
F 5
(NO) key to cancel return-to-origin.
Fig. 4-11-85
50%[MG][S0H0J]
MANUAL
Current position
*M1= 21593 *M2=
8216 *M3= 68468
Origin return again?
YES
NO
2) After return-to-origin (absolute search on semi-absolute mode axes) is complete, the
machine reference on each axis is displayed.
Fig. 4-11-86
50%[MG][S0H0J]
MANUAL
Machine reference (%)
M1=
50 M2=
50 M3=
50
POINT
PALLET
ORIGIN
VEL+
VEL-
3) When return-to-origin on all axes is complete, the dashed line (- - - -) on the message
line changes to a solid line (––––) indicating that return-to-origin is now complete.
Then, pressing an axis movement key displays the current position on each axis.
4) To cancel the return-to-origin operation, press the
STOP
key.
In this case, the message "0.14: Stop executed" appears on the message line.
c
CAUTION
Before performing return-to-origin,
check that all axis arms are in
positions that allow return-to-origin
operation.
w
WARNING
The robot starts moving as soon
as return-to-origin is performed.
To avoid hazardous situations,
do not enter the robot movement
range.
c
CAUTION
Emergency stop might be triggered if
return-to-origin or absolute search is
simultaneously performed on three or
more axes whose return-to-origin
method is the stroke end detection
method. In this case, change the
setting so that stroke end return-to-
origin or absolute search is
simultaneously performed on two
axes or is performed separately on
each axis.
n
NOTE
When two robots are specified, return-
to-origin is first performed on the main
group and then on the sub group.
n
NOTE
• Refer to "11.8.1 Return-to-origin
operation" for details on return-to-
origin operation, and refer to "11.8.2
Semi-absolute" for details on
absolute search operation.
• The machine reference is expressed
as a percentage of the number of
encoder pulses showing the
difference between the origin sensor
signal and position detector
reference signal (encoder zero
signal, etc.). This is also called the
"grid position" or "grid pulse".
n
NOTE
Once return-to-origin is completed, the
origin position is retained until the
controller power is turned off or
system parameters are changed. So it
is not necessary to re-perform return-
to-origin even after using emergency
stop.
Summary of Contents for RCX141
Page 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E93 Ver 2 02 RCX141 ...
Page 2: ......
Page 16: ...viii MEMO ...
Page 18: ...MEMO ...
Page 24: ...1 6 MEMO ...
Page 26: ...MEMO ...
Page 34: ...2 8 MEMO ...
Page 36: ...MEMO ...
Page 54: ...3 18 MEMO ...
Page 290: ...4 232 MEMO ...
Page 292: ...MEMO ...
Page 316: ...5 24 MEMO ...
Page 318: ...MEMO ...
Page 326: ...6 8 MEMO ...
Page 328: ...MEMO ...
Page 338: ...7 10 MEMO ...
Page 340: ...MEMO ...
Page 346: ...MEMO ...
Page 401: ...MEMO ...