





























Functions
09.2008
6SE7087-6QX70 (Version AK)
Siemens AG
7-32
Compendium Motion Control
SIMOVERT MASTERDRIVES
The setup/positioning block provides the positioning functionality. This
function block can be found in function diagram 789b and, as for setup,
is assigned to a time slot using parameter U953.61.
The positioner is a position controller whose position difference
(
∆
S[LU]), which is derived from the setpoint position and actual
position, is reduced to "0" using the specified acceleration and
deceleration and maximum speed values.
U850.1(875)
KK
Position
setpoint [LU]
∆
S[LU]
X
Software limit switch
for POS & SETUP , Linear axis
SWE -2
31
+1...2
31
-1[LU]
PLUS: U865.1 (0)
MINUS: U865.2 (0)
and if:
U865.1 or .2 <>0
and
AZL (U858) = 0
[ARFD]
n862.1 /7
Backlash
compensation
2
31
...2
31
-1[LU]
U872 (0)
B (210)
[330.7]
1
–
+
U863.2 ... .3
B (888)
.2
.3
U850.2(883)
KK
Position-
actual val [LU]
–
REL_MOD
U883 (0)
0
1
&
[789b.8]
0 ... 1
KK0871
[POS_TYP_ACT]
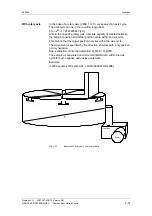
Fig. 7-10
Position controller: derivation of
∆
S position difference
The positioner can be operated both in the block configuration
described here or as a stand-alone function. The block then behaves as
with constant transfer from the set setpoint module in function diagram
789a. The triggered variant is implemented by the upstream connection
of the set setpoint block.
Changes to the setpoint are effective immediately.
The positioner consists of a position controller that controls the position
difference
∆
S to
∆
S = 0 while maintaining the specified acceleration
and deceleration and the speed setpoint. In doing this, the position
controller operates correctly according to established control
technology principles.
Possible overrunning of the target position is not prevented, as the
compensation movements are carried out within the limits of the
specified setpoints (acceleration/deceleration).
Example: If a target position is not reached within the set ramp, braking
takes place on the ramp and the axis travels to the target position in the
opposite direction.
Behavior in accordance with correct control principles also means
possible overrunning of the specified target position (oscillation).
Positioning mode
(POS_ON)
DANGER