





























19
– 2
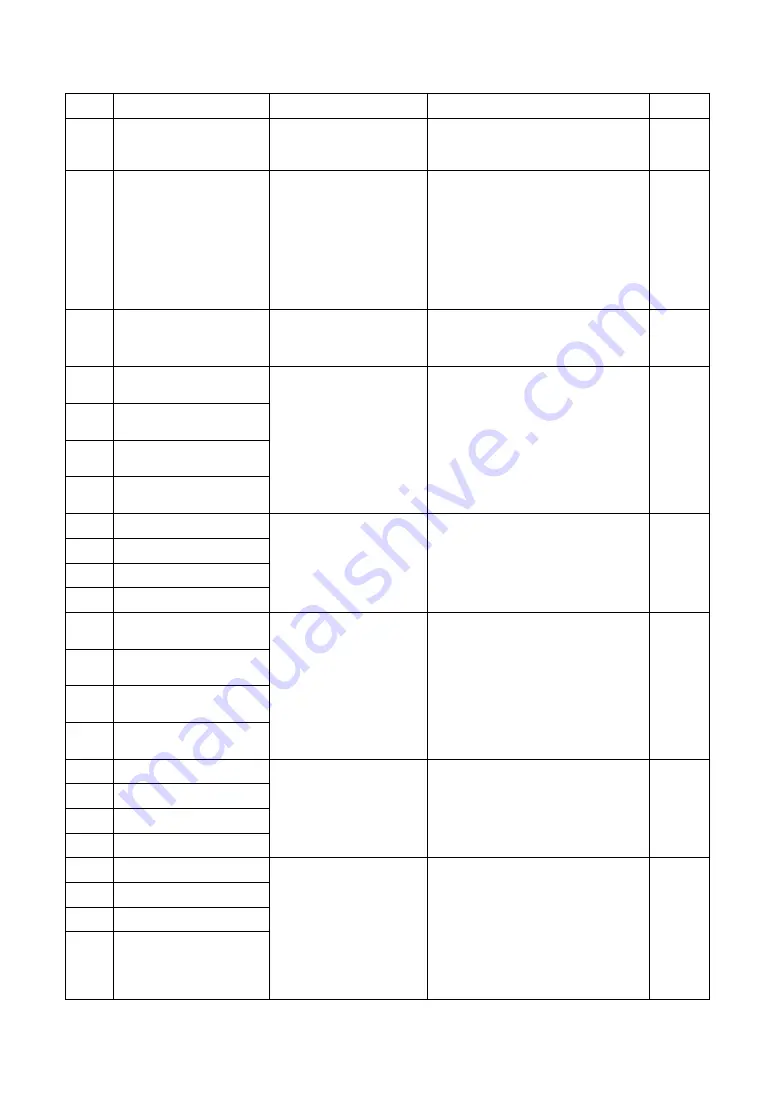
19.2 Error Table
No.
Error name
Meaning/Cause
Remedy
State
ER02
Incompatible controller
An incompatible type of
T/P was connected to
the controller.
Check the T/P and controller model,
and use the correct type.
L-*G-N
ER12
Watchdog timer error
The CPU is being
overloaded.
Turn the power off and then on
again. The CPU may be overloaded
due to noise.
Refer to section 2.4.3 for measures
for reducing and preventing noise.
*The error cannot be cleared by
CLEAR or a reset. The power must
be turned off and on again.
F-R-1
ER13
Emergency stop
The emergency stop
switch or emergency
stop input was activated.
Clear the emergency stop switch or
emergency stop input.
F-R-1
ER20
Axis 1
communication error
An error occurred in
communication with the
slave unit.
Check if the link cable is
disconnected, has a bad contact, or
a broken wire. Also, check that the
power supply is operating normally.
*The error cannot be cleared by
CLEAR or a reset. The power must
be turned off and on again.
F-R-1
ER30
Axis 2
communication error
ER40
Axis 3
communication error
ER50
Axis 4
communication error
ER21
Axis 1 overspeed error
The motor speed is
abnormally high
Check if the maximum speed setting
is within the specification range.
F-R-1
ER31
Axis 2 overspeed error
ER41
Axis 3 overspeed error
ER51
Axis 4 overspeed error
ER22
Axis 1
overcurrent error
A driver error occurred
due to a low voltage,
excessive current, or
driver overheating.
Check if the input current has fallen
below -10% of the voltage setting,
the transportable weight has been
exceeded, the robot has contacted
the mechanical stopper, the robot
has contacted a foreign object, or
the controller cable has a
short-circuit or ground fault.
F-R-1
ER32
Axis 2
overcurrent error
ER42
Axis 3
overcurrent error
ER52
Axis 4
overcurrent error
ER23
Axis 1 overload error
The motor load is large,
or a current exceeding
the rated current has
flowed continuously.
Check if the transportable weight
has been exceeded, the robot has
contacted the mechanical stopper,
the robot has contacted a foreign
object, or the cable has a broken
wire.
F-R-1
ER33
Axis 2 overload error
ER43
Axis 3 overload error
ER53
Axis 4 overload error
ER24
Axis 1 overflow
The motor could not
perform tracking for the
command.
Check if the overflow data value is
set correctly, the
acceleration/deceleration time is
normal, the transportable weight has
been exceeded, the robot has
contacted the mechanical stopper,
the robot has contacted a foreign
object, or the cable has a broken
wire.
F-R-1
ER34
Axis 2 overflow
ER44
Axis 3 overflow
ER54
Axis 4 overflow
Summary of Contents for CA20-M10
Page 2: ......
Page 14: ...XII 21 6 Spare parts 21 5 21 6 1 Controller spare parts 21 5 21 6 2 Axis spare parts 21 5...
Page 24: ...1 10 This page is blank...
Page 104: ...4 20 This page is blank...
Page 112: ...5 8 This page is blank...
Page 152: ...7 20 This page is blank...
Page 190: ...10 20 This page is blank...
Page 234: ...11 44 This page is blank...
Page 244: ...12 10 This page is blank...
Page 286: ...15 4 This page is blank...
Page 300: ...17 12 This page is blank...
Page 352: ...18 52 This page is blank...
Page 382: ...21 6 This page is blank...
Page 383: ......
Page 384: ...Back cover Q3178E 03 APR 20...







































































