





























360
No Abbr.
Parameter function and description Mode
Default
Range Unit
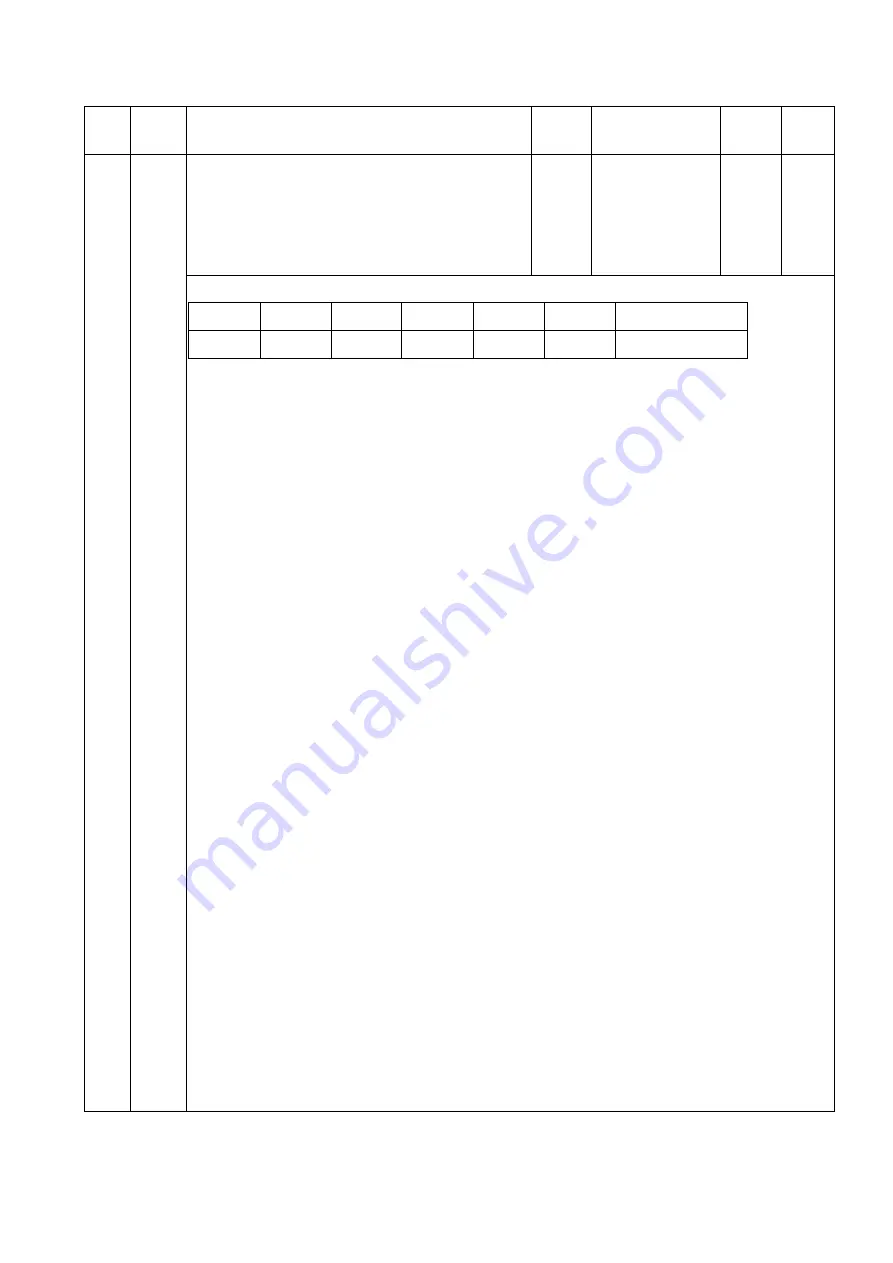
PE01
PDEF1
Definition of homing
The detailed parameter definition is as
follows:
Pr
00000000h
00000
000h~
10FFF
F3Fh
N/A
31~28 27~24 23~20 19~16 15~12 11~8
7~0 bit
BOOT
−
DLY
−
DEC1 ACC
PATH
1.PATH: path type(bit0~bit7)
0: Stop: homing complete and stop
1~63:Auto: homing complete and execute the specified path.
2.ACC: select acceleration time 0 - F , which is correspond to PF49~PF64.
3.DEC1: deceleration time selection for first homing, DEC setting is 0~F, which
is correspond to PF49~PF64.
3.
DLY: delay time selection, DLY setting is 0~F, which is correspond to
4.
PF65~PF80.
5.BOOT: when the drive is powered on, whether to search for the origin
0: do not execute homing.
1: execute homing automatically (servo on for the first time after power on).
6.
Apart from the above definitions, the related settings for homing also include:
a.
a.PA04 homing mode.
b.
b. PA08~PA09 speed setting of searching for the origin.
c.
c. PE02: ORG_DEF is the coordinate of the origin and may not be 0. This
function is used as a traversal of the coordinate.
Note1: after the origin (sensor or Z) is found, the servo has to decelerate to
stop. The stop position exceeds the origin by a short distance:
1.
If returning to the origin is not needed, set PATH to 0.
2.
If returning to the origin is needed, set PATH to a non-zero value and set
PABS = ORG_DEF.
d.
Note 2: if the origin is found (sensor or Z), and you want the servo to move an
offset S and define the coordinate as P after moving, then PATH = non-zero and
set ORG_DEF = P - S, and this absolute position command = P.
Содержание SDP Series
Страница 33: ...20 400V series DC 24V Power supply Note terminal P N cannot be grounded ...
Страница 42: ...29 2 CN1 connector male Front view Side view Rear view CN1 wiring terminal on the back of CN1 1 26 50 25 ...
Страница 45: ...32 4 The last step is to fasten the screw of housing ...
Страница 203: ...190 It is recommended that the user performs torque position mode switching after motor is stopped completely ...
Страница 385: ...372 ...
Страница 405: ...392 ...
Страница 499: ...486 SME L040 SME L075 SME L100 SME L150 ...
Страница 500: ...487 SME L200 SME L300 SME M100 SME M150 ...
Страница 509: ...496 When the load reaches 300 the operation time is 5 51 seconds ...
Страница 541: ...528 Middle inertia power cable Middle inertia 2KW 3KW 400V High inertia power cable 1 8KW 2 9KW 4 4KW 5 5KW 7 5KW ...
Страница 555: ...542 14 5 Manual version and revision history Manual version V1 00 Release month July 2022 ...







































































