





























13
– 5
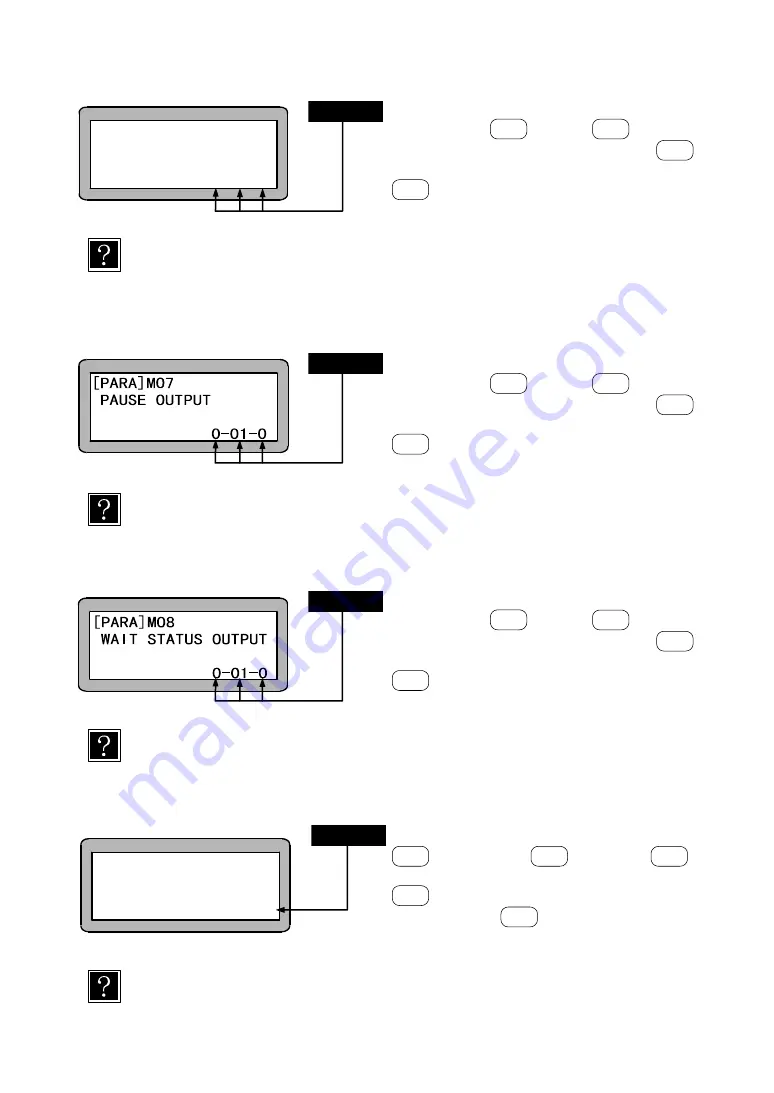
13.2.6 Designation of return to origin input bit
Use the numeric keypad to designate the input
bit and press
ENT
. When
NEXT
is pressed,
the next screen will display, and when
-NEXT
is
pressed, the previous screen will display. Press
ESC
to return to the PARA mode screen.
The initial value (port 01-5) of the return to origin input is decided, but it can be
changed with this bit designation.
When CC-link is used, this parameter is not available.
13.2.7 Designation of pausing output bit
Use the numeric keypad to designate the output
bit and press
ENT
. When
NEXT
is pressed,
the next screen will display, and when
-NEXT
is
pressed, the previous screen will display. Press
ESC
to return to the PARA mode screen.
When the pausing output bit is designated, the designated bit will turn ON while
operation is paused (temporarily stopped). (Refer to section 10.2.16.)
13.2.8 Designation of input wait output bit
Use the numeric keypad to designate the output
bit and press
ENT
. When
NEXT
is pressed,
the next screen will display, and when
-NEXT
is
pressed, the previous screen will display. Press
ESC
to return to the PARA mode screen.
When the input wait output bit is designated, the designated bit will remain ON while
the program is waiting for the input of the IN command. (Refer to section 10.2.15.)
13.2.9 Setting of Teach Pendant display (Japanese/English) mode
Switch between Japanese/English by pressing
ALT
and press
ENT
. When
NEXT
is
pressed, the next screen will display, and when
-NEXT
is pressed, the previous screen will
display. Press
ESC
to return to the PARA
mode screen.
J: Japanese E: English
The display here refers to the display of the Teach Pendant screens.
[
P
A
R
A
]
M
0
6
R
E
T
U
R
N T
O O
R
G
.
I
N
P
U
T
0
-
0
1
-
0
STEP 1
STEP 1
STEP 1
[PARA]M09
DISPLAY J:JAPANESE
E:ENGLISH
[J ]
STEP 1
Содержание CA20-M10
Страница 2: ......
Страница 14: ...XII 21 6 Spare parts 21 5 21 6 1 Controller spare parts 21 5 21 6 2 Axis spare parts 21 5...
Страница 24: ...1 10 This page is blank...
Страница 104: ...4 20 This page is blank...
Страница 112: ...5 8 This page is blank...
Страница 152: ...7 20 This page is blank...
Страница 190: ...10 20 This page is blank...
Страница 234: ...11 44 This page is blank...
Страница 244: ...12 10 This page is blank...
Страница 286: ...15 4 This page is blank...
Страница 300: ...17 12 This page is blank...
Страница 352: ...18 52 This page is blank...
Страница 382: ...21 6 This page is blank...
Страница 383: ......
Страница 384: ...Back cover Q3178E 03 APR 20...





















































